 2015-10-14
2015-10-14 1881
1881Совокупность силы, равной главному вектору, и пары сил с моментом, равным главному моменту, коллинеарным главному вектору, называется динамическим винтом или динамой.
Пусть в произвольном центре О система сил приведена к главному вектору R и главному моменту М0.
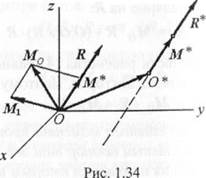
Разложим главный момент М0 на две составляющие (рис. 1.34), направленные по главному вектору и перпендикулярно к нему:
М0 = М* + М1. (I)
 Величина вектора М*, равная проекции главного момента на направление главного вектора, не зависит от выбора центра приведения, т.е.
Величина вектора М*, равная проекции главного момента на направление главного вектора, не зависит от выбора центра приведения, т.е.
М* = const,
причем численно
 С изменением центра приведения будет изменяться только пендикулярная составляющая М1. Мы всегда можем найти такой центр приведения О*, чтобы переменная составляющая М1 обратилась в нуль.Тогда главный момент и главный вектор будут коллинеарны, а вектор М*0 будет иметь минимальную величину, определяемую формулой (2). Составляющая М1 представляет собой момент пары сил, плоскость которой перпендикулярна М1 (рис. 1.35) Выберем силы R1 и –R1, состовляющие эту пару,равны по модулю главному вектору R и приложим силу –R1к центру приведения О. Система сил R и –R1 приложенная к точке О, как эквивалента нулю может быть отброшена. Так как момент М* - вектор свободный, то его можно перенести из точки О в О*. Таким образом, заданная система сил приведена в центре О* к одной силе R1 = R и к паре сил с моментом М*,то есть мы получили динамический винт.
С изменением центра приведения будет изменяться только пендикулярная составляющая М1. Мы всегда можем найти такой центр приведения О*, чтобы переменная составляющая М1 обратилась в нуль.Тогда главный момент и главный вектор будут коллинеарны, а вектор М*0 будет иметь минимальную величину, определяемую формулой (2). Составляющая М1 представляет собой момент пары сил, плоскость которой перпендикулярна М1 (рис. 1.35) Выберем силы R1 и –R1, состовляющие эту пару,равны по модулю главному вектору R и приложим силу –R1к центру приведения О. Система сил R и –R1 приложенная к точке О, как эквивалента нулю может быть отброшена. Так как момент М* - вектор свободный, то его можно перенести из точки О в О*. Таким образом, заданная система сил приведена в центре О* к одной силе R1 = R и к паре сил с моментом М*,то есть мы получили динамический винт.
Точка О не единственная, в которой система приводится к динаме. В самом деле, силу R можно переносить вдоль линии ее действия, момент же пары сил есть вектор свободный. Следовательно, система сил может быть приведена к динаме во всех точках прямой, проходящей через центр приведения О* и являющейся линией действия главного вектора R1 = R.
Геометрическое место центров приведения, относительно которых главный момент коллинеарен главному вектору, называется центральной осью данной системы сил.
Так как на центральной оси главный момент имеет минимальное значение, эта ось называется осью наименьших главных моментов.
Найдем теперь уравнение центральной оси. Пусть О* точка центральной оси. Тогда
М*= M0+О*OхR= Мо-ОО*хR. (3)
Условие коллинеарности главного вектора и главного момента для точки О* записываем следующим образом:
M* = pR. (4)
Здесь р - постоянная величина, имеющая размерность длины, называемая параметром винта.
Т.к. величина минимального момента М* определяется формулой (2), то
Очевидно, что знак параметра определяется знаком второго инварианта. При р > 0, R и М* направлены в одну сторону.
Подставляя в формулу (4) значение минимального момента М* из (3), получим
M0-ОO*xR =pR. (6)
Таким образом нами получено уравнение центральной оси в векторной форме, причем текущей координатой является вектор ОО*. Если координаты векторов М0, R и ОО* обозначить
Мо(МX,Му, Мz), R(RX, Ry Rz:), OO*(х, у, z), то в проекциях на оси координат уравнение центральной оси примет вид
| P |
Мх – (yRz - zRy) Му - (zRx - xRz) Mz - (xRy - yRx)
Rx Ry Rz
Итак, всякая система сил, действующая на твердое тело, для которой второй инвариант не равен нулю, приводится к динаме.

