 2015-10-16
2015-10-16 9344
9344Одним из самостоятельных направлений технической кибернетики является направление, связанное с разработкой систем автоматизированного проектирования (САПР) разного рода объектов и систем.
Управление — функция системы, ориентированная либо на сохранение ее основного качества (т. е. совокупности свойств, утеря которых влечет разрушение системы) в условиях изменения среды, либо на выполнение некоторой программы, долженствующей обеспечить устойчивость функционирования, гомеостаз, достижение определенной цели. Понятие управления формализовано настолько, чтобы можно было дать его точное и при этом достаточно широкое определение; более того, всякое описательное определение управления неизбежно оперирует понятиями, общепринятые формализации которых не выработаны (система, среда, цель, программа и др.). Приведенное определение предусматривает два случая; первый из них имеет место в самоорганизующихся системах — биологических, социальных и социально-экономических; второй случай характерен для отдельных подсистем самоорганизующихся систем, а также для разнообразных технических устройств. При этом цель, в зависимости от трактовки соответствующего понятия, можно соотносить отдельным частным случаям управления либо считать неотъемлемым атрибутом управления вообще.
Систему, в которой реализуются функции управления, обычно называют системой управления и выделяют в ней две подсистемы: управляющую и управляемую. Управляющая система осуществляет функции управления, управляемая система является его объектом. Если управление осуществляется сознательно, то управляющая система создается субъектом управления, который формирует также цель (цели) управления. Иногда понятия субъект и цель управления трактуются шире: субъект управления отождествляется с управляющей системой (независимо от ее природы), а в качестве цели принимается выполнение программы управления. Разделение системы управления на управляющую и управляемую подсистемы не всегда можно произвести однозначно. В технических системах возникающие при этом трудности не имеют принципиального характера, а касаются лишь удобства описания (например, при телеуправлении размещаемые на объекте управления устройства приема и передачи информации можно относить как к нему самому, так и к управляющей системе).
Между управляющей и управляемой системами необходимы каналы связи. По каналу связи, ведущему к управляющей системе от управляемой, передается информация о состоянии последней, точнее, о текущих значениях существенных переменных объекта управления; по каналу связи противоположного направления передается управляющая информация (управляющие воздействия). Таким образом, управляющая и управляемая системы соединены контуром обратной связи. В некоторых случаях канал связи для передачи информации о состоянии объекта управления отсутствует (имеется лишь прямая связь); такие схемы управления весьма ограничены по возможностям и отличаются низкой надежностью. Простейшая схема управления с обратной связью изображена на рис. 1, где R — управляющая система, О — управляемая система (объект управления), Е — среда системы управления, d — канал передачи информации о состоянии объекта управления, f — канал передачи управляющей информации, i — воздействия среды на объект управления, а — выход объекта управления. Эта схема, в частности, адекватно описывает многочисленные механизмы регулирования и технических и биологических системах по принципу гомеостаза.
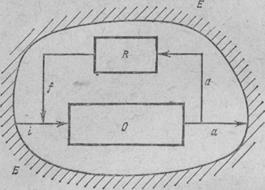
Рис. 1.
Состояние объекта управления в какой-либо момент времени здесь зависит от его предшествующих состояний, воздействий среды и управляющих воздействий, а состояние управляющей системы — от состояния объекта управления (и, возможно, ее собственных предшествующих состояний).
Механизмы регуляции по такой схеме в технических и биологических системах, как правило, действуют автоматически; при этом материальная субстанция, измерение которой дает информацию о состоянии объекта управления (давление пара, температура, электромагнитные характеристики и т. д.), используется в канале связи f как носитель этой информации. Для преобразования информации о состоянии в управляющую информацию управляющая система R соответственно изменяет величину сигнала, полученного по каналу f (см. Коэффициент обратной связи) или реализует трансформацию в качественно иной носитель (например, давление — в напряжение электрического тока). В данном частном случае — при автоматическом функционировании управляющей системы — ее обычно называют регулятором, хотя нередко эти два термина употребляются как синонимы. Важной отличительной особенностью сознательно управляемых социальных и экономических систем является обязательное наличие посредника в связях d и f, т. е. отсутствие автоматизма их функционирования. Это обусловливает многие специфические требования к организации систем социально-экономического управления, определению его качества, выдвигает проблему стимулирования.
Рисунка 1, однако, недостаточно для описания некоторых систем регулирования в технике, поведения высших животных, управляемого развитой высшей нервной деятельностью, и тем более для описания систем управления социальными и экономическими процессами.
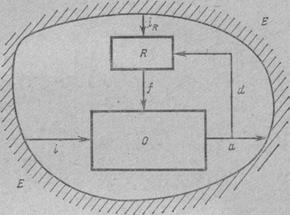
Рис. 2
В этих случаях управляющая система не только регистрирует состояние объекта управления, но и наблюдает за изменениями среды, прогнозируя возможные реакции объекта на эти изменения (т. е. осуществляет упреждающее определение его состояний, в данном случае — траекторий развития) с целью заблаговременного принятия соответствующих мер. Одна из возможных в подобных случаях схем информационных связей представлена на рис. 2.
В обеих приведенные схемах, а также других возможных вариантах информационного взаимодействия управляемой и управляющей систем последняя представляет собой орган переработки информации о состоянии объекта управления и среды функционирования системы управления в целом в управляющие воздействия. В различных частных случаях управляющие воздействия могут принимать самую разнообразную форму; при управлении экономикой их совокупность достаточно полно, хотя и не исчерпывающе охватывается понятием административно-хозяйственная структура.
Имеются различные принципы классификации как процессов переработки информации при управлении, так и вырабатываемых ими управляющих воздействий. В экономике наиболее существенно разделение управляющих воздействий на непосредственные и косвенные.
В административно-хозяйственной структуре непосредственное управляющее воздействие, будучи направлено на конкретный хозяйственный объект (любого уровня структуры до высшего включительно) или на любой объект из определенной совокупности, выражается в нормативном установлении показателя, фиксирующего значение какой-либо характеристики развития или функционирования данного объекта или границу изменения такой характеристики (например, рентабельности, прибыли, производительности труда, фонда заработной платы и т. д.); наиболее важные частные случаи — лимиты потребления ресурсов и задания по выпуску продукции для отдельных хозяйственных ячеек. Непосредственные управляющие воздействия, таким образом, представляют собой средства директивного влияния управляющей системы на объект управления, их назначение состоит в прямом ограничении множества его возможных состояний.
Косвенные управляющие воздействия основаны па использовании того обстоятельства, что ячейки социально-экономической системы представляют собой самоорганизующиеся системы, целенаправленно оптимизирующие свое развитие и функционирование в соответствии с собственными (имманентными) интересами. Эти интересы определяют отношение предпочтения каждой хозяйственной ячейки на множестве ее возможных состояний, однако данное отношение зависит от некоторой совокупности внешних параметров (прежде всего, ценностных показателей — цен, норм ренты, ставок различных отчислений и платежей и т. д.). Фиксация значений подобных параметров и составляет содержание косвенных управляющих воздействий; варьируя такие значения, управляющая система не меняет множества возможных состояний объекта управления, но ориентирует предпочтения на этом множестве в направлении, желательном с точки зрения цели управления, тем самым содействуя ее достижению.
При этом одно и то же управляющее воздействие может быть непосредственным по отношению к одним ячейкам социально-экономической системы и косвенным — по отношению к другим. Например, директивное установление в каждом экономическом районе объема деятельности отраслей, производящих услуги, распределяемые через общественные фонды потребления, является косвенным управляющим воздействием на процессы движения населения и трудящихся, т. е. на определенные ячейки социальной структуры общества. Область эффективности непосредственных воздействий сравнительно широка при управлении производственно-технологической структурой хозяйства и узка при управлении социальной структурой общества; относительно косвенных воздействий справедливо противоположное утверждение.
Совокупность управляющих воздействий, распределенных во времени, соответствующая какой-либо информации о состоянии объекта управления и среды (т. е. выход управляющей системы, обусловленный некоторыми значениями ее входов), называется управляющим решением. Всякое управляющее решение предполагает уменьшение разнообразия объекта управления (в случае использования косвенных воздействий — с учетом его самоорганизации). Закон необходимого разнообразия определяет требования к избирательной способности управляющей системы, обусловливаемые тем уменьшением разнообразия объекта управления, которое необходимо для эффективности управления.
Усиление избирательной способности управляющей системы (т. е. увеличение ее пропускной способности как канала связи, мощности по переработке информации или же собственного разнообразия) является центральной проблемой при разработке больших систем управления.
У. Р. Эшби наметил аналогию между усилителями мощности в технике и усилителями разнообразия управляющей системы: последняя должна пользоваться каким-либо интенсивным источником разнообразия, так направляя его функционирование, чтобы индуцировать проявления его избирательной способности, соответствующие цели управления. Таким источником разнообразия в социально-экономическом управлении является человек с его целенаправленной самоорганизующейся деятельностью, и проблема усиления избирательной способности управляющей системы в значительной мере сводится к проблеме человеческих факторов в управлении. Подобно техническим усилителям мощности усилители разнообразия могут быть многокаскадными: это достигается иерархической организацией управляющей системы. Кроме того, совершенствование структуры управляющей системы достигается реализацией принципа непрерывного (скользящего) управления.
Если все процедуры переработки информации о состояниях объекта управления и среды в управляющие решения могут быть формализовано описаны, такое описание называют алгоритмом управления. Современные требования к быстродействию, надежности, точности управления и информационная нагрузка на управляющую систему столь высоки, что могут быть удовлетворены лишь при широкой автоматизации процессов управления, для которой требуется формализация управленческих процедур. Однако полная формализация при управлении большими системами невозможна; это вызывает необходимость использования принципа внешнего дополнения.
Формализация процессов управления в социально-экономической системе опирается на использование математического моделирования, причем для прогноза состояний среды и объекта управления (в частности, принимаемых в результате тех или иных управляющих воздействий) применяются преимущественно дескриптивные, а для выработки управляющих решений — нормативные модели.
Кибернетика в биологии - и сследование кибернетических систем в биологических организмах, прежде всего сосредотачиваясь на том, как животные приспосабливаются к их окружающей среде, и как информация в форме генов передаются от поколения к поколению. Также имеется второе направление — киборги.
Киборги, как синтез робота и живого организма, знакомы из фантастических повестей и рассказов. В понимании их авторов, киборг – это конструкция из живого человеческого мозга и искусственного тела из металла, пластика и электронной "начинки". Причиной создания подобных человеко-машинных конструкций, по мнению фантастов, являются крайне агрессивные по отношению ко всему живому условия космоса, который человечеству рано или поздно придется осваивать [2].
Почему человечество стремиться создать именно киборга а не просто робота? Все дело в том, что даже снабженный самой мощной и способной к самосовершенствованию ЭВМ, робот смог бы прекрасно выполнять любые присланные по радио команды своих создателей, но вряд ли способен самостоятельно реагировать на самые невероятные условия, с которыми он может встретиться на чужих планетах, настолько далеких, что радиолуч с Земли будет идти до них непозволительно долго.
Сможет ли робот понять, что на планете, куда он послан с разведывательно-исследовательской целью, существует разумная жизнь, особенно если ее представители совершенно не похожи на нас и даже на все наши самые смелые фантазии?
Авторы фантастических романов утверждают, что только человеческий мозг способен в достаточной степени гибко реагировать на незнакомые внешние условия, а создать полный электронный аналог мозга людям еще, наверное, долго будет не по силам.
Вот отсюда и возникла идея киборга - робота с живым мозгом, словно Кащеева душа глубоко упрятанного в мыслимые и немыслимые защитные оболочки. Ведь это сделать гораздо проще, чем защитить все тело целиком. Но дальше мнения авторов расходятся. Одни из них представляют киборгов в образе добрых всемогущих джиннов другие ошеломляли читателя бездной войн и насилия, в которых взбунтовавшиеся киборги хладнокровно уничтожают таких неприспособленных и непоследовательных, ни на что не годных людей [2].
Киборги могут стать реальностью уже в ближайшие десятилетия. И наука для этого почти все сделала.
Искусственное тело. Сегодня уже редко кого удивляет мертвая железно-пластмассовая рука-протез, повинующаяся мысленным приказам своего хозяина не хуже живой.
Биоэлектрическое управление. Эта технология, родившаяся на стыке электроники и бионики, уже давно вышла за стены экспериментальных лабораторий. В числе ее заслуг не только возвращение к активной и почти полноценной жизни безногих и безруких, но даже и восстановление подвижности парализованного тела при безнадежных повреждениях спинного мозга. Созданы и чувствительные протезы-манипуляторы с обратной связью, когда установленные на них датчики после усиления и преобразований подают полученные сигналы непосредственно на нервные волокна, обеспечивающие в теле человека осязательную "обратную связь".
Электронные органы чувств:
"электронный глаз" из тысяч миниатюрнейших фотодатчиков (применяется в нынешних видеокамерах) может не только видеть сверхбыстрые движения, ультрафиолет или, с помощью инфракрасного света, помогать ориентироваться в темноте и тумане, но и, благодаря сложнейшей программе обработки изображений, позволит киборгу повышать резкость и четкость увиденного, а при помощи интерференции волн, различать как отдельные объекты точки, сливающиеся для невооруженного глаза в одно целое;
"электронное ухо", способное воспринимать неслышимые нами инфра- и ультразвуки;
С разработкой машинной части киборга заметных проблем сегодня нет, кроме чисто технических задач по созданию достаточно сильных и компактных "искусственных мышц", да повышению качества датчиков.
Главная часть киборга - живой мозг. Его работоспособность нужно поддерживать автономно, без тела. Сегодня это кажется невозможным. Но вспомним: разве не то же самое делают во время сложнейших операций на "выключенном", остановленном сердце современные аппараты искусственного кровообращения (АИК)? Подключим к АИК'у "искусственные легкие" и "искусственные почки" (и те, и другие тоже давно несут свою службу в клиниках), вольем в кровь глюкозу и ряд других необходимых для питания нейронов компонентов, - и "новый Франкенштейн" вполне может открыть глаза на лабораторном столе.
Даже о защите от инфекций природа уже позаботилась: почти непробиваемый энцефалический барьер надежно разделяет кровь и внутримозговую жидкость, позволяя вместе с тем им обмениваться кислородом и питательными веществами. А совсем недавно за рубежом прозвучали сообщения о первых экспериментах по созданию из двух обреченных на смерть людей одного живого организма, тело которого взято от одного донора, а голова - от другого (только проблема паралича остается: медики не умеют пока сращивать разрезанный спинной мозг).
Остается последнее, самое важное: соединить искусственное тело и, посредством микропроцессоров, живой мозг. До недавнего времени это можно было отнести к безнадежному фантазерству: ну как, в самом деле, передать непосредственно от мозга к исполнительным микрокомпьютерам нужные команды, и, что еще сложнее, сигналы от искусственных органов чувств мозгу, не зная даже более или менее четко, как именно этот мозг работает?
Если, допустим, исследователям удалось бы расшифровать структуру и "функциональную схему" мозга одного или даже нескольких подопытных добровольцев и разработать соответствующие схемы подключения, то это ничем не поможет для решения стоящей перед нами грандиозной задачи: дело в том, что структура мозга, скорее всего, у разных людей различна во множестве деталей, которые формируются индивидуально в процессе развития, воспитания и обучения каждого из них.
Правда, время для исследователей тайн человеческого мозга не проходит даром, и сегодня многие его механизмы раскрыты в достаточной степени, чтобы, например, вызывать подачей на вживленные электроды слабеньких импульсов тока те или иные эмоции или зрительные образы решеток разной густоты и наклона, - элементарных "субъединиц", на которые мозг разлагает увиденное глазом изображение перед его дальнейшей обработкой.
Конечно, этого слишком мало! Несколько лет тому назад в печати появились сообщения о том, что американцы и австрийцы уже осваивают управление ЭВМ непосредственно "с мыслей" оператора, причем вполне успешно, и создали для этого соответствующие электронные приставки. Правда, то были первые эксперименты, и их результаты пока не слишком впечатляющи: австрийская разработка позволяет управлять мигающим на экране крестообразным курсором, наводя его на квадрат-мишень, а американская хотя и реализует мысленный ввод текста, но со скоростью, гораздо меньшей по сравнению с обычным набором с клавиатуры.
Как же разработчики обошли проблему "мозговой несовместимости" разных операторов и нашли в мозге необходимые "контактные площадки" для подключения приставки? Решение оказалось очень простым. Устройство снимает с головы оператора полную энцефалограмму, а затем вся "мешанина" полученных электромагнитных сигналов подается в компьютер и расшифровывается им по принципу, аналогичному алгоритмам работы программ распознавания символов или принципам работы персептронов (довольно-таки любопытных обучающихся устройств, созданных еще на заре кибернетики и сегодня незаслуженно преданных забвению). В результате ЭВМ должна какое-то время учиться понимать конкретного оператора, сопоставляя его "мысленные" команды с поданными вручную, а после завершения такого обучения человек и машина смогут достигнуть необходимого "взаимопонимания" и "слиться в единое целое" [2].
Так что, принципиальное решение, как видим, найдено. А что касается вживления процессоров в организм человека, то эта технология как раз и лежит в основе тех самых чувствительных протезов, о которых мы говорили раньше.
Осенью 1995 года в телепрограмме "Вести": американские ученые, занимающиеся проблемами "сопряжения" процессоров с живой тканью, заявили о принципиальной готовности современной науки к вживлению микрокомпьютера непосредственно в мозг с целью повысить "вычислительные" способности его владельца и дать ему возможность обращаться к базам данных через глобальные спутниковые компьютерные сети. И пусть даже такой Homo Computicus не будет нести в своем организме ничего другого от мира техники: все равно мы будем говорить о нем как о киборге.

