 2015-10-16
2015-10-16 512
5123.1. Задачі
Проектування структурної схеми механізму, яка задовольняє задані умови:
l число ланок;
l число кінематичних пар відповідних класів;
l степінь вільності механізму.
МЕХАНІЗМ – це ланцюг вимушеного руху. Інакше, якщо одну з ланок кінематичного ланцюга з'єднати з двигуном (кількома двигунами) і решта ланок будуть здійснювати визначений закономірний рух, то з кінематичного ланцюга отримуємо механізм за умови, що одну з ланок перетворено на стояк.
3.2. Структурна формула просторового механізму
(формула Сомова-Малишева)
Позначимо:
 - число ланок кінематичного ланцюга;
- число ланок кінематичного ланцюга;
 - число кінематичних пар 1–го класу;
- число кінематичних пар 1–го класу;
 - число кінематичних пар 2–го класу;
- число кінематичних пар 2–го класу;
 - число кінематичних пар 3–го класу
- число кінематичних пар 3–го класу
 - число кінематичних пар 4-го класу;
- число кінематичних пар 4-го класу;
 - число кінематичних пар 5-го класу;
- число кінематичних пар 5-го класу;
 - число степенів вільності до утворювання кінематичного ланцюга.
- число степенів вільності до утворювання кінематичного ланцюга.
Тоді при утворюванні кінематичного ланцюга ( – степінь
– степінь
рухомості КЛ):

| (3.1) |
При перетворенні кінематичного ланцюга на механізм одна з ланок перетворюється на стояк, тоді степінь рухомості механізму:

| (3.2) |
або

Позначимо:  - число рухомих ланок, тоді остаточно:
- число рухомих ланок, тоді остаточно:

| (3.3) |
- структурна формула просторового механізму або
формула Сомова - Малишева.
3.3. Структурна формула плоского механізму
(формула Чебишева)
Як відомо, тіло в площині має 3 степеня вільності, отже, перетворюємо формулу Сомова – Малишева з урахуванням зазначеного:

або

| (3.4) |
- структурна формула плоского механізму або формула Чебишева.
Степінь рухомості механізму вказує на кількість двигунів, якими механізм приводиться до руху, або на кількість початкових ланок, або узагальнених координат.
3.4. Зв'язки механізму
3.4.1. Зв'язки, що накладені кінематичною парою (див. п. 1.5.2.)
3.4.2. Загальні зв'язки - це зв'язки, що накладені ще до утворювання кінематичного ланцюга. Число таких зв'язків:
 , де А – коефіцієнт при n в структурній формулі.
, де А – коефіцієнт при n в структурній формулі.
Наприклад, для плоского механізму 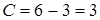 .
.
За числом загальних зв'язків механізми діляться на 5 сімейств. Плоскі механізми, відповідно, відносяться до третього сімейства.
3.4.3. Надлишкові (пасивні) зв'язки – це зв'язки, що повторюються, але фактично не змінюють степеня рухомості механізму.
Розглянемо приклад плоского механізму (рис.3.1).
Визначимо степінь рухомості за формулою Чебишева:
 .
.
 . Потрібен 1 двигун.
. Потрібен 1 двигун.
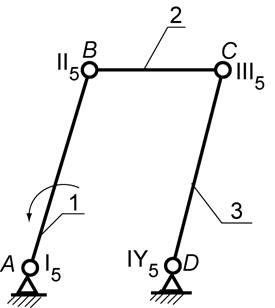
Для підвищення жорсткості конструкції (або з функціональних міркувань) у механізм уводять додаткову ланку EF (рис. 3.2).
| 
|
| Рис. 3.1 | Рис. 3.2 |
Визначаємо степінь рухомості механізму на рис. 3.2:
 .
.
 .
.
Але фактичний степінь рухомості  . Отже, цей результат означає, що в механізмі є надлишковий зв'язок (ланка EF).
. Отже, цей результат означає, що в механізмі є надлишковий зв'язок (ланка EF).
До появи надлишкових зв'язків призводять:
l уведення додаткових ланок для надання специфічних властивостей механізму;
l неточності виготовлення ланок і кінематичних пар;
l залишкові або пружні деформації ланок.
Надлишкові зв'язки:
l вимагають підвищеної точності виготовлення механізму, що підвищує його вартість;
l призводять до збільшення сил тертя в кінематичних парах, що зменшує надійність механізму;
l призводять до статичної невизначеності механізму.
Висновок: раціонально спроектовані механізми не повинні мати надлишкових зв'язків.
3.4.4. Формули Озола для визначення числа надлишкових зв'язків
l для плоских механізмів:

| (3.5) |
l для просторових механізмів:
 , ,
| (3.6) |
де  - число надлишкових зв'язків;
- число надлишкових зв'язків;  - фактичний степінь рухомості.
- фактичний степінь рухомості.
3.4.5. Усунення надлишкових зв'язків
Одним із методів усунення надлишкових зв'язків є зміна класу кінематичної пари.
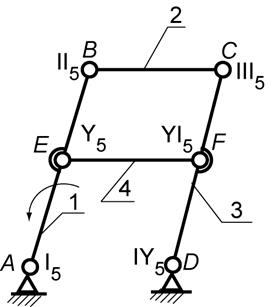
Розглянемо приклад шарнірно-важільного механізму (рис.3.3).
Рис. 3.3
Якщо в даному механізмі осі шарнірів A,B,C паралельні, тобто виконуються умови: 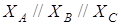 і
і  , то механізм є плоским, і його степінь рухомості можна визначити за формулою Чебишева:
, то механізм є плоским, і його степінь рухомості можна визначити за формулою Чебишева:
 . Потрібен1 двигун.
. Потрібен1 двигун.
Якщо з будь-яких причин осі шарнірів не паралельні, тобто вищенаведені умови не виконуються, то механізм стає просторовим, і його степінь рухомості необхідно обчислювати за формулою Сомова-Малишева:
 .
.
Тут  .
.
Такий результат свідчить про наявність у механізмі надлишкових зв'язків (механізм буде рухатися зі “скрипінням”, при цьому знос кінематичних пар різко зростає, що неприпустимо).
Визначимо число надлишкових зв'язків за формулою Озола для просторових механізмів (фактичний степінь рухомості ).
 .
.
Одним із методів усунення надлишкових зв'язків є зміна класу кінематичної пари.
Змінюємо в шарнірі С даного механізму кінематичну пару 5-го класу на кінематичну пару 3-го класу - сферичний шарнір (рис. 3.4).
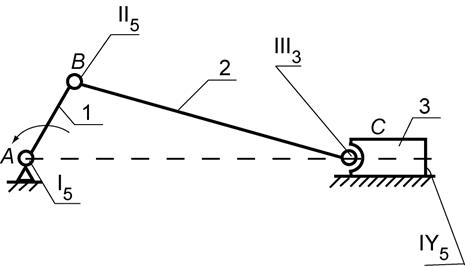
Рис. 3.4
Число надлишкових зв'язків за формулою Озола:
 .
.
Тут  .
.
Залишився один надлишковий зв'язок.
Змінимо тепер клас кінематичної пари в шарнірі В із 5-го на 4-й – (циліндрична пара), як показано на рис. 3.5.
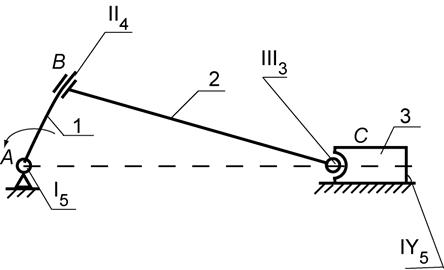
Рис.3.5
Число надлишкових зв'язків за формулою Озола:
 .
.
Тут  .
.








