 2015-10-13
2015-10-13 2352
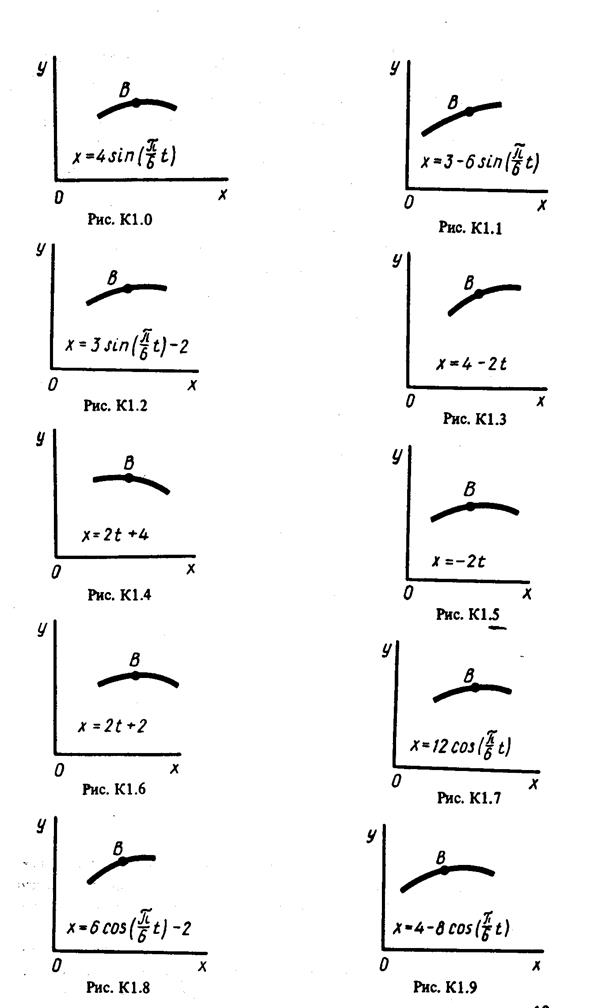
2352Точка В движется в плоскости ху (рис. Kl.0 — Kl.9, табл. Kl; траектория точки на рисунках показана условно). Закон движения точки задан уравнениями: x = f1 (t), у = f2 (t) где х и у выражены в сантиметрах, t — в секундах. Найти уравнение траектории точки; для момента времени t1 = 1 с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Зависимость x = f1(t) указана непосредственно на рисунках, а зависимость у = f1 (t) дана в табл. Kl (для рис. 0 — 2 в столбце 2, для рис. 3— 6 в столбце 3, для рис. 7 — 9 в столбце 4). Как и в задачах Cl, С2, номер рисунка выбирается по предпоследней цифре шифра, а номер условия в табл. К1 — по последней.
Таблица К1
| Номер условия | Y= f2(t) | ||
| Рис. 0-2 | Рис. 3-6 | Рис. 7-9 | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  |
Указания. Задача Kl относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное и нормальное ускорения точки.
В данной задаче все искомые величины нужно определить только для момента времени t = 1 с. В некоторых вариантах задачи при определении траектории или при последующих расчетах (для их упрощения) следует учесть известные из тригонометрии формулы: cos 2α = 1 — 2sin2 α = 2cos2 а — 1; sin 2α = 2 sin α cos α.
Пример Kl. Даны уравнения движения точки в плоскости ху:
x = — 2cos((π ∕4) · t) + 3. y=2sin ((π ∕8)· t) — 1
( х. у — в сантиметрах, t — в секундах).
Определить уравнение траектории точки; для момента времени t = 1 с найти скорость и ускорение. точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Решение. 1. Для определения уравнения траектории точки исключим из заданных уравнений движения время t. Поскольку t входит в аргументы тригонометрических функций, где одаргумент вдвое больше другого, используем формулу
cos 2α = 1 — 2 sin2 α или cos ((π/4) ·t) = 1 — 2sin2 ((π/8) ·t) (1)
Из уравнений движения находим выражения соответствующих функций и подставляем в равенство (1). Получим
cos ((π/4) * t) = (3 — x)/2, sin ((π/8) * t) = (y+1)/2
следовательно,
(3 — х)/2 = 1 — (2(y+1)2)/4
Отсюда окончательно находим следующее уравнение траектории точки (парабола, рис. Kl):
точки (парабола, рис. Kl):
x = (y+1)2 + 1 (2)
2. Скорость точки найдем по ее проекциям на координатные оси:
Vx = dx/dt = (π/2)· sin (πt/4);
Vy = dy/dt = (π/4) · cos (πt/8);
V = 
При t = 1 c V1x = 1.11см/с, V1y = 0.73 см/с, V1 = 1.33 см/с
3. Аналогично найдем ускорение точки:
ax =  =
=  cos
cos  ; ay =
; ay =  = —
= —  sin
sin  ;
;
a = 
и при t = 1 c a1x = 0.87 см/с2, a1y = — 0.12 см/с2, a1 = 0.88 см/с2. (4)
4. Касательное ускорение найдем, дифференцируя по времени равенство V1 = V2x + V2y.Получим
 и
и
Числовые значения всех величин, входящих в правую часть выражения (5), определены и даются равенствами (3) и (4). Подставив в (5) эти числа, найдем сразу, что при t1 = 1 с а1τ = 0,66 см/с2.
5. Нормальное ускорение точки  . Подставляя сюда
. Подставляя сюда
найденные числовые значения а1 и а1τ, получим, что при t = 1 с a1n = 0,58 см/с2.
6. Радиус кривизны траектории  . Подставляя сюда числовые значения V1 и a1n найдем, что при t1 = 1 с
. Подставляя сюда числовые значения V1 и a1n найдем, что при t1 = 1 с  = 3,05 см.
= 3,05 см.
0 т в е т: V1= 1,33 см/с, а1 = 0,88 см/с2, а1τ = 0,66 см/с2, а1n = 0,58 см/с2,  = 3,05 см.
= 3,05 см.
Задача К2
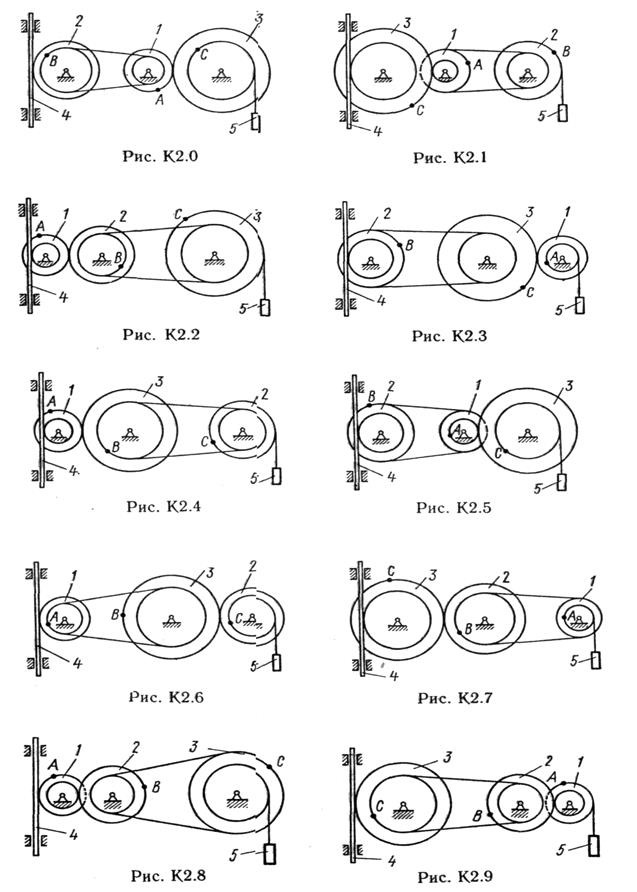
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 – r1= 2 см, R1 = 4 см, у колеса 2 — г2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, В и С.
Таблица К.2
| Номер условия | Дано | Найти | |
| скорости | ускорения | ||
| s4=4(7t-t2) |  , ,  |  ,aA,a5 ,aA,a5 | |
 =2(t2-3) =2(t2-3) |  , , |  , aB,a4 , aB,a4 | |
 =2t2-9 =2t2-9 |  , ,  |  ,aC,a5 ,aC,a5 | |
| =7t-3t2 | ,  | ,aA,a4 | |
 =3t- t2 =3t- t2 | ,  |  ,aB,a5 ,aB,a5 | |
| =5t-2t2 |  , , | ,aC,a4 | |
 =2(t2-3t) =2(t2-3t) | , | ,aC,a5 | |
| =3t2-8 | , | , aB,a5 | |
| s5=2t2-5t | , | ,aC,a4 | |
| =8t-3t2 | , | ,aA,a4 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t)— закон вращения колеса 1, s4(t)— закон движения рейки 4, ω2(t) — закон изменения угловой скорости колеса 2, υ5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и υ4, υ5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (υ — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (υ5— скорость груза 5 и т.д.).
Указания. Задача К2 — на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что, когда два колеса находятся в зацеплении, скорость точки зацепления каждого колеса одна и та же, а когда два колеса связаны ременной передачей, то скорости всех точек ремня и, следовательно, точек, лежащих на ободе каждого из этих колес, в данный момент времени численно одинаковы; при этом считается, что ремень по ободу колеса не скользит.
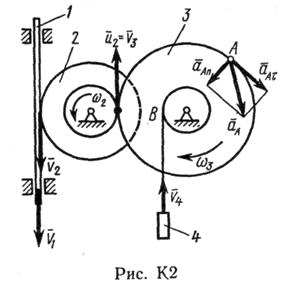
Пример К2. Рейка 1, ступенчатое колесо 2 с радиусами R2 и г2 и колесо 3 радиуса R3, скрепленное с валом радиуса г3, находятся в зацеплении; на вал намотана нить с грузом 4 на конце (рис. К2). Рейка движется по закону s1 = f(f).
Д а н о: R2 = 6 см, г2 = 4 см, R3 = 8 см, г3 = 3 см, s1 = Зt3 (s — в сантиметрах, t — в секундах), А — точка обода колеса 3, t1 = 3 с. Определить: ω3, υ4, ε3, aAв момент времени t = t1.
 Решение. Условимся обозначать скорости точек, лежащих на внешних ободах колес (радиуса Ri), через υi, а точек, лежащих на внутренних ободах (радиуса гi), — через ui.
Решение. Условимся обозначать скорости точек, лежащих на внешних ободах колес (радиуса Ri), через υi, а точек, лежащих на внутренних ободах (радиуса гi), — через ui.
1. Определяем сначала угловые скорости всех колес как функции времени t. Зная закон движения рейки 1, находим ее скорость:  . (1)
. (1)
Так как рейка и колесо 2 находятся в зацеплении, то υ2 = υ1 или ω2R2= v1. Но колеса 2 и 3 тоже находятся в зацеплении, следовательно, и2 = υ3 или ω2r2 = ω3R3. Из этих равенств находим
 . (2)
. (2)
Тогда для момента времени t1 = 3 с получим ω3 = 6,75 с -1.
2. Определяем υ4. Так как υ4 = υB= ω3r3, то при t1 = 3 с υ4 = 20,25 см/с.
3. Определяем ε3. Учитывая второе из равенств (2), получим ε3 =  = 1,5t. Тогда при t1 = 3 с ε3 = 4,5 с -2.
= 1,5t. Тогда при t1 = 3 с ε3 = 4,5 с -2.
4. Определяем a А. Для точки A  , где численно
, где численно  = R3ε3,
= R3ε3,  =
=  . Тогда для момента времени t1 = 3 с имеем
. Тогда для момента времени t1 = 3 с имеем
= 36 см/с2, = 364,5 см/с2;
 = 366,3 см/с2.
= 366,3 см/с2.
Все скорости и ускорения точек, а также направления угловых скоростей показаны на рис. К2.
О т в е т: ω3 = 6,75 с -1, υ4 = 20,25 см/с, ε3 = 4,5 с -2,  =366,3 см/с2.
=366,3 см/с2.








