2015-10-14
2015-10-14 3816
3816Interbus использует процедуру доступа к шине по схеме ведущий/ведомый (Master/Slave) с передачей маркера. При этом шинный Мастер обеспечивает одновременный интерфейс к высокоуровневой управляющей системе и выполняет функции управления шиной. Топология Interbus это физическое и логическое кольцо, у которого физический уровень построен на основе стандарта RS485. Это дифференциальный интерфейс, использующий витую пару для информационных передач. Для реализации кольца Interbus-кабель использует две витые пары (для дуплексного режима) плюс дополнительный провод для передачи сигнала логическая земля. Такая физическая структура позволяет организовать сеть, работающую на скорости 500 кбит/с на расстоянии 200 м между двумя соседними узлами сети. Общее число устройств сети ограничено 512 узлов.
Достоинства: существенно упрощающая конфигурирование системы автоадресации, расширенные диагностические возможности, широкая распространенность (особенно в Европе), низкие издержки, малое время отклика, рациональное использование пропускной способности, подача напряжения питания (для устройств ввода) по сетевому кабелю.
Недостатки: ограниченные возможности по передаче данных большого объема [2].
ProfiBus PA
Протокол PROFIBUS-PA основан не на RS485, а на реализации стандарта IEC1158-2,который обеспечивает надежность и питание полевых приборов через шину, для организации технологии передачи в опасных средах. С помощью PROFIBUS-PA могут быть реализованы отдельные структуры: линейные, древовидные, звездообразные, а также их комбинации.
Количество шинных сегментов, занятых участниками шины зависит от установленных источников питания, тока, потребляемого участниками, типа кабеля и экрана шинной системы. На шинную систему можно подключить до 32 участников. С обеспечением внутренней безопасности на одном сегменте PROFIBUS-PA могут работать до десяти абонентов, при условии, что общее потребление тока никогда не превышает 100 мА. В помещениях, не требующих обеспечения внутренней безопасности, на одном сегменте PROFIBUS-PA могут работать до 30 абонентов. Используемая скорость передачи равна тогда 31,25 Кбит/с [2].
CANbus
CAN (Control Area Network) – магистраль с топологией «шина». Интерфейс CAN является универсальным решением, его можно использовать как на уровне Field level так и на уровне Sensor level.
Максимальная скорость передачи: 1 Mbit/s при длине линии до 40 м или - 40 Kbit/s при длине линии 1000 м. При этом практически любой CAN – контроллер допускает программирование скорости обмена - от 1 Mbit/s до 10Kbit/s
Общее количество CAN - узлов не ограничено протоколом. Сообщения по CAN – шине могут передаваться одному или одновременно нескольким узлам, настроенным на прием одних и тех же параметров [2].
Достоинства:
- гарантированное время отклика;
- гибкость конфигурации;
- групповой прием с синхронизацией времени;
- система непротиворечивости данных;
- обнаружение ошибок и их сигнализация.
LON
Протокол LON (LONTalk) – от Local Operating Network – разработан в для интеллектуальных систем жизнеобеспечения зданий. В LONTalk есть протоколы и методы кодирования для разнообразных физических каналов передачи данных. Например, для витой пары используется метод манчестерского кодирования, для работы на сегментах линий электропроводки и на радиоканалах применяется частотная модуляция. LON-сеть может состоять из сегментов с различными физическими средами передачи. Это витая пара, радиочастотный канал, инфракрасный луч, линии напряжения, коаксиальный и оптический кабели. Для каждого типа физического канала существуют трансиверы, обеспечивающие работу сети на различных по длине каналах, скоростях передачи и сетевых топологиях. Назначение адресов производится при помощи средства менеджмента сети. Этим средством может выступать как программа, так и аппаратный узел. Адрес LON устройства состоит из трех частей: номер домена; номер подсети; номер узла. Номер домена определяет набор LON устройств, которые могут взаимодействовать между собой. Устройства должны иметь одинаковый номер домена, чтобы обмениваться между собой. Возможно нахождение до 32385 устройств в одном домене. [2]
Проведем сравнительный анализ протоколов полевого уровня. Для этого составим таблицу сравнительных характеристик, в которой представлены такие показатели как топология сети, канал передачи данных, метод коммуникации, возможность передачи питания вместе с данными.
Таблица 2
Сравнительные характеристики
| Топология | Канал передачи | Метод коммуникации | Питание с данными | |
| ASI | Шина, звезда, Дерево | Витая пара | Master\Slave с опросом | + |
| DEVICE NET | Шинная с отводами | 4-х проводной кабель | Master/Slave multimaster | + |
| CAN | шина | Скрученная пара | CSMA\CA | - |
| FIELDBAS | Звезда, шина | витая пара, оптоволокно | Клиент-сервер | + |
| PROFI BAS-PA | Дерево, шина, звезда | Витая пара | мaster/slave +маркер | + |
| INTERBUS | кольцо | Витая пара | Master/Slave+ маркер | + |
| HART | Точка-точка звезда | Экр. витая пара | Master/Slave+ цикл. опрос | + |
| LON TALK | дерево | различные | CDMA/CS | + |
| WorldFIP | шина | Витая пара оптоволокно | Broadcast+арбитр | + |
Из табл. 2 видно, что лишь в протоколе INTERBUS используется топология кольцо, это несомненно является его преимуществом по отношению к другим протоколам. Так как при разрыве сети сообщение может пойти в обратную сторону кольца и все равно достигнет адресата, при использовании других топологий передача данных прекратится.
Что касается канала передачи данных, основными критериями при выборе являются: доступность, дешевизна, простота монтажа. Бесспорно лучшим каналом, исходя из этих характеристик, является витая пара. Следовательно протоколы, поддерживающие этот физический интерфейс являются более распространенными, реализация сетей на их основе наиболее целесообразна.
Метод коммуникации имеет большое значение с точки зрения надежности передачи данных, он определяет приоритеты всех узлов на получение сообщения, отвечает за разрешение коллизий. Наиболее надежным можно назвать метод Master/Slave+маркер. Использование маркера позволяет увеличить надежность, избежать коллизий. Исходя из этого, протоколы INTERBUS, PROFIBAS-PA являются более приемлемыми при построении сети.
Возможность передачи питания по одному каналу вместе с данными является дополнительным преимуществом, все рассматриваемые протоколы кроме CAN позволяют это организовать.
Для более детального анализа построим вторую таблицу, в которой представлены количественные характеристики протоколов, такие как максимальное расстояние передачи данных, максимальное количество узлов сети, размер сообщения с полезной информацией, скорость передачи данных.
Таблица №3
Количественные характеристики
| Макс. расстояние | Макс. Кол-во узлов | Размер сообщения | Скорость передачи | |
| ASI | 300м | 4 бита | 53 кбит/с | |
| DEVICE NET | 500м | 8 байт | 125-500кбит/с | |
| CAN | 1000м | 0-8 байт | 40кбит/с-1мби/с | |
| FIELDBAS | 2000м | 240 на сегмент +65500сегм. | 128 байт | 31,25кбит 100мбит |
| PROFI BAS-PA | 1900м | 0-244байт | 31,25кбод | |
| INTERBUS | 200м | 512байт | 500кбит/с -2мбит/с | |
| HART | 3000м | 15 –slave, 2- мастер | 0-25байт | 1.2кбит/с |
| LON TALK | В пределах здания | 32000 в одном домене | 228бит | До 1.25 Мбод |
| WorldFIP | 15000м | 128байт | 1мбит/с-2.5мбит/с |
Выводы
Из табл. 3 видно, что все из представленных протоколов позволяют передавать информацию на расстояние большее 100м, а в табл. 1 показано, что расстояния на полевом уровне не превышают 100м, следовательно все из рассматриваемых протоколов могут без каких либо ограничений использоваться на этом уровне.
Скорости передачи данных, которые могут реализовать протоколы, колеблются от 1кбит/с до 2,5 мбит/с. Главным условием построения сети является обмен информацией узлами в режиме реального времени. Если учесть что скорость передачи сообщений одного датчика порядка 50кбит/с, то протокол должен обеспечивать суммарную скорость не менее 800кбит/с между всеми узлами сети. Отнюдь не все из рассматриваемых протоколов способны это реализовать.
В результате сравнительного анализа, исходя из сведений табл. 2 и 3, хотел бы выделить протокол INTERBUS, который удовлетворяет всем критериям выбора, а по многим показателям превосходит своих конкурентов. В нем единственном из всех рассмотренных используется топология сети «кольцо»,что несомненно является его достоинством с точки зрения надежности. Кроме того он позволяет передавать данные со скоростью до 2 мбит/с, что полностью удовлетворяет условиям построения сети. Вместе с тем INTERBUS позволяет организовать соединение до 512 узлов, что так же является хорошим показателем по сравнению с альтернативными решениями. Каналом передачи является витая пара, которая обладает относительно небольшой стоимостью и проста при монтаже. Единственным наглядным параметром, по которому INTERBUS уступает другим шинам, является максимальное расстояние передачи, равное 200м, однако эта характеристика не является критичной для нижнего уровня ИИС, следовательно, оптимальным протоколом является INTERBUS.
Билет 27. Протоколы нижнего уровня SensorBUS, основные требования, решаемые задачи, характеристики, режимы, топология связи.
Библиографическое описание: Губанов А. И. Промышленные сети для диагностики и управления [Текст] / А. И. Губанов, А. Б. Николаев // Молодой ученый. — 2011. — №4. Т.3. — С. 14-18. В статье рассмотрены принципы работы различных промышленных сетей для диагностики и управления. Предложены некоторые технологические решения типовых промышленных сетей в автоматизации The article deals with the principles of the various industrial networks for the diagnosis and management. Propose some technical solutions typical of industrial automation networks. Ключевые слова: промышленные сети, сетевые топологии, передача данных. Keywords: industrial networks, network topology, data transmission. Цифровая технология проникла на все уровни промышленного производства и управления. Возникла задача обмена данными между всеми уровнями технологического процесса. В результате появились следующие понятия: CIM (ComputerIntegratedManufacturing) - комплексное компьютеризированное производство и CIP (ComputerIntegratedProcessing) – комплексная компьютерная обработка [1]. Эти понятия охватывают все технологические и организационные моменты, необходимые для получения нового качества изделий. Самым существенным компонентом модели CIM/CIP является организация связи, а это, прежде всего, гарантия надежной регистрации событий, получения и обработки данных, своевременной выдачи управляющих воздействий. Гарантия совместной работы отдельных частей системы возможна лишь при использовании соответствующих стандартов связи между этими частями. Похожая статья: Анализ организации управления, филиальной сети, планов развития ОАО «ЕВРАЗ Металл Инпром» Административный уровень системы управления производством сегодня представлен целым рядом протоколов, среди которых наиболее известны два: протокол автоматизации производства (ManufacturingAutomationProtocol, MAP, фирмы GeneralMotors) и протокол технического и административного учреждения (Technical Office Protocol, TOP, фирмы Boeing). Для более низких уровней (field level), т.е. уровней промышленных контроллеров, датчиков и исполнительных механизмов, стандартной информационной системы не существует. Эта область развивается сейчас благодаря усилиям отдельных компаний или их групп [2]. Любая производственная технология представляет собой набор отдельных шагов: от обработки сырья до организации системы хранения продукции, и все эти операции должны быть связаны информационными сетями. Сети, обеспечивающие информационные потоки между контроллерами, датчиками сигналов и разнообразными исполнительными механизмами, объединяются общим названием "промышленные сети" (FieldBus, или "полевая" шина). Промышленная сеть должна решать две основные задачи: обеспечивать совместимость на уровне сети приборов от разных производителей; обеспечивать выход в коммерческие системы обработки данных (MAP или ТОР). Объединение в одну цифровую сеть нескольких устройств - это только начальный шаг к эффективной и надежной работе системы связи между ними. В дополнение к аппаратным требованиям предъявляется также ряд программных требований. Там, где системы связи или сети гомогенные (однородные), то есть объединяют устройства от одного производителя, эти проблемы решены. Но когда речь идет о построении сети из устройств различных производителей, эти задачи обретают множественный характер. Уникальные системы (продукт и поддержка одного производителя) работают по уникальным протоколам связи. Они получили название "закрытых систем" (closed/ proprietary systems). "Открытые системы" (open systems) приводят в соответствие специфические требования интересам всех. Большинство промышленных сетей поддерживают 1, 2 и 7-ой уровни OSI-модели: физический уровень, уровень передачи данных и прикладной уровень. Все другие уровни (сетевой, транспортный, сеансовый, представления данных), как правило, избыточны. Все, что находится выше 7-го уровня модели, это задачи, решаемые в прикладных программах. Физический уровень (Physical Layer) обеспечивает необходимые механические, функциональные и электрические характеристики для установления, поддержания и размыкания физического соединения. Похожая статья: Использование сети Интернет при обучении иностранному языку Уровень передачи данных (Data Link Layer) гарантирует передачу данных между устройствами. Этот уровень управляет не только сетевым доступом, но также механизмами защиты и восстановления данных в случае ошибок при передаче. Прикладной уровень (Application Layer Inferface) обеспечивает непосредственную поддержку прикладных процессов и программ конечного пользователя и управление взаимодействием этих программ с различными объектами сети передачи данных. Как исключение существуют протоколы промышленных сетей, реализующие все семь уровней OSI-модели, например LonWorks. Сетевая топология описывает способ (тип) сетевого объединения различных устройств. Существует несколько видов топологий, отличающихся одна от другой по трем основным критериям: режиму доступа к сети; средствам контроля передачи и восстановления данных; возможности изменения числа узлов сети. Основные топологии - это звезда, кольцо и шина. Сравнение этих топологий представлено в таблице 1. В структуре топологии типа "звезда" вся информация передается через центральный узел, так называемый обрабатывающий компьютер. Каждое устройство имеет свою собственную среду соединения. Все периферийные станции могут обмениваться друг с другом только через центральный узел. Преимущество этой структуры в том, что никто кроме центрального узла не может влиять на среду передачи. Таблица 1 Сравнительные характеристики основных топологий Характеристики Тип топологии звезда кольцо шина Режим доступа Доступ и управление через цен-тральный узел Децентрализованное управление. Доступ от узла к узлу Централизованный и децентрализо-ванный доступ Надежность Сбой централь-ного узла – сбой сети Разрыв линии связи приводит к сбою сети Ошибка одного узла не приводит к сбою сети Расширяемость Ограничено числом физических портов на центральном узле Возможно расширение числа узлов, но время ответа снижается Однако центральный узел должен быть исключительно надежным устройством как в смысле логического построения сети (отслеживание конфликтных ситуаций и сбоев), так и физического, поскольку каждое периферийное устройство имеет свой физический канал связи и, следовательно, все они должны обеспечивать одинаковые возможности доступа. Дополнительное устройство может быть включено в сеть только в том случае, если организован порт для его подсоединения к центральному узлу. В структуре типа "кольцо" информация передается от узла к узлу по физическому кольцу. Приемник копирует данные, регенерирует их вместе со своей квитанцией подтверждения следующему устройству в сети. Когда начальный передатчик получает свою собственную квитанцию, это означает, что его информация была корректно получена адресатом. В кольце не существует определенного централизованного контроля. Каждое устройство получает функции управляющего контроллера на строго определенный промежуток времени. Отказ в работе хотя бы одного узла приводит к нарушению работы кольца, а следовательно, и к остановке всех передач. Чтобы этого избежать, необходимо включать в сеть автоматические переключатели, которые берут на себя инициативу, если данное устройство вышло из режима нормальной работы. То есть они позволяют включать/выключать отдельные узлы без прерывания нормальной работы. В структуре "шина" все устройства подсоединены к общей среде передачи данных, или шине. В отличие от "кольца" адресат получает свой информационный пакет без посредников. Похожая статья: Методическая разработка «Рисунок как средство диагностики психического развития дошкольников в условиях ДОУ» Процесс подключения дополнительных узлов к шине не требует аппаратных доработок со стороны уже работающих узлов сети, как это имеет место в случае топологии "звезда". Однако шинная топология требует жесткой регламентации доступа к среде передачи. Существуют два метода регулирования такого доступа, известного еще под термином "шинный арбитраж": "фиксированный мастер" (централизованный контроль шины): доступ к шине контролируется центральным мастер-узлом; "плавающий мастер" (децентрализованный контроль шины): благодаря собственному интеллекту каждое устройство само определяет регламент доступа к шине. Основными преимуществами промышленных сетей являются недорогие линии и надежность передачи данных. Данные передаются последовательно бит за битом, как правило, по одному физическому каналу (одному проводнику). Такой режим передачи не только экономит кабельное оборудование, но и позволяет решать задачи по надежной передаче данных на большие расстояния. Время передачи, однако, увеличивается пропорционально длине битовой строки. Широко используемый стандартный интерфейс RS-232C обеспечивает работу стандартного оборудования передачи данных между модемами, терминалами и компьютерами. Электрически система основана на импульсах 12В, кодирующих последовательности "0" и "1". Механически этот стандарт определяет 9- и 25-контактные разъемы. Основные сигналы передаются по линиям "передача/прием" данных. Скорость передачи выбирается из диапазона от 50 до 38400 бод. Остальные сигнальные линии передают статусную информацию коммутируемых устройств. Симметричный интерфейс RS-422 использует дифференциальные сигнальные линии. На приемном конце используются две информационные линии и линия заземления. В основе кодирования передаваемых/ принимаемых данных лежит принцип изменения напряжения на сигнальных линиях. Реализованный принцип кодирования делает этот стандарт устойчивым к внешним возмущениям. Использование данного стандарта позволяет значительно удлинять физические линии передачи данных и увеличивать скорость. С помощью интерфейса RS-422 можно строить и шинные структуры. Интерфейс RS-485 соответствует спецификации симметричной высокоскоростной передачи данных, описанной в американском стандарте IEA RS-485. Максимальная длина варьируется от 1,2 км на скорости до 90 кбод и до 200 м на скорости до 500 кбод. В таблице 2 приводятся сравнительные характеристики этих трех стандартных физических интерфейсов. Кроме типа физического интерфейса при построении промышленной сети не менее важно учитывать особенности и ограничения физической среды передачи данных. Таблица 2 Сравнительные характеристики стандартных физических интерфейсов Характеристика Интерфейс RS-232C RS-422 RS-485 Максимальное число приемников/передатчиков на линии 1/1 1/10 32/32 Максимальная длина линии (без повторителей), м 15 1220 1220 Максимальная скорость передачи, кбод 38,4 90 90…500 В таблице 3 приведены оценочные данные, сравнивать по которым можно основные типы сред передачи по ряду критериев. Таблица 3 Сравнительные характеристики различных сред передачи данных Характеристика Витая пара Радио-канал Коаксиаль-ный кабель Опто-волокно Типовой диапазон 1…103 50…104 10…104 10…104 Скорость передачи, кбод 0,3…2000 1,2…9,6 300…104 1…104 Если несколько устройств коммутируются между собой через общую линию связи (шину), то должен быть определен ясный и понятный протокол доступа к ней. Существуют два метода упорядоченного доступа: централизованный и децентрализованный. Именно по этой причине децентрализованный контроль с переходящими функциями Мастера от одного участника (узла сети) к другому получил наибольшее развитие. Здесь права мастера назначаются группе устройств сети. Приняты и используются две модели децентрализованного доступа: модель CSMA/CD (например, Ethernet) как стандарт IEEE 802-3; модель с передачей маркера как стандарт IEEE 802.4 (Token Passing Model). Для совместной работы сетей типа CSMA/CD и Token Model необходим так называемый межсетевой шлюз. Решение доступа к шине методомMASTER-SLAVE находит свое применение как на контроллерном уровне (field level), так и на уровне датчиков и исполнительных механизмов (sensor/actuator level). Право инициировать циклы чтения/записи на шине имеет только MASTER-узел. Он адресует каждого пассивного участника (SLAVE node), обеспечивает их данными и запрашивает у них данные. Наиболее известным механизмом управления локальной сетью шинной конфигурации является метод множественного доступа с контролем шины и обнаружением конфликтов, так называемый случайный метод доступа к шине CSMA/CD (CarrierSenseMultipleAccesswithCollisionDetection). Широко известная реализация этого метода - спецификация Ethernet. Все станции на шине имеют право передавать данные. Каждая из них постоянно прослушивает шину. Если шина свободна, любой из участников сети может занять шину под свой цикл передач. Если несколько станций претендуют на шину одновременно, это приводит к так называемому конфликту (коллизии), тогда все "претенденты снимают свою заявку". Затем каждый из участников включает некий случайный генератор, который задает случайный интервал ожидания до следующего момента запроса шины. Метод CSMA/CD получил широкое распространение в офисных системах и наиболее эффективен в условиях относительно низкой общей загрузки канала (менее 30%). В условиях большей загрузки канала выгоднее использовать сети, реализующие модель с передачей маркера. Метод передачи маркера TTPM(TheTokenPassingMethod) обеспечивает право доступа к шине в цикле от устройства к устройству. Порядок передачи зависит от прикладной задачи и определяется на стадии планирования системы. Этот метод предлагает каждому участнику сети "справедливое" разделение шинных ресурсов в соответствии с их запросами. Принцип передачи маркера используется в системах, где реакция на события, возникающие в распределенной системе, должна проявляться за определенное время. Предпочтительность того или иного сетевого решения как средства транспортировки данных можно оценить по следующей группе критериев: объем передаваемых полезных данных; время передачи фиксированного объема данных; удовлетворение требованиям задач реального времени; максимальная длина шины; допустимое число узлов на шине; помехозащищенность; денежные затраты в расчете на узел. Часто улучшение по одному параметру может привести к снижению качества по другому, то есть при выборе того или иного протокольного решения необходимо следовать принципу разумной достаточности. В зависимости от области применения весь спектр промышленных сетей можно разделить на два уровня: Field level (промышленные сети этого уровня решают задачи по управлению процессом производства, сбором и обработкой данных на уровне промышленных контроллеров); Sensor/actuator level (задачи сетей этого уровня сводятся к опросу датчиков и управлению работой разнообразных исполнительных механизмов). Другими словами, необходимо различать промышленные сети для системного уровня (field busses) и датчикового уровня (sensor/actuator busses). Сравнение этих двух классов в самом общем виде приведено в таблице 4. На сегодняшний день спектр протоколов для обоих этих классов довольно широк. Область их применения лежит на одном из двух уровней. Типичные представители открытых промышленных сетей: PROFIBUS (ProcessFieldBus) и BITBUS. Типичныеоткрытыесенсорные (датчиковые) сети: ASI (Actuator/Sensor Interface), Interbus-S, PROFIBUS-DP (Profibus for Distributed Periphery) и SERCOS interface. Таблица 4 Характеристики промышленных сетей типов Fieldbus и Sensorbus Характеристика Fieldbus Sensorbus Расширение сети, м 100...1000 &#<;100 Время цикла, с 0,01...10 0,001...1 Объем передаваемых данных за цикл, байт 8...1000 1...8 Доступ к шине Фиксиров./ свободный Свободный Типичныеоткрытыесетидляобоихуровнейприменения: CAN (Controller Area Network), FIP (Factory Instrumentation Protocol) и LON (Local Operating Network). На рисунке 1 представлена обобщенная сетевая структура, показывающая в общем виде возможное использование того или иного протокола на определенных уровнях условного промышленного предприятия. Заключение В связи с проведенным анализом можно сделать вывод целесообразности применения таких видов сетей, как CAN, FIP, LON, для создания надежной и высокотехнологичной системы мониторинга и управления процессами добычи и транспортировки нефти, а также состоянием нефтедобывающего оборудования. Рисунок 1. Уровни связи и типовые промышленные сети в автоматизации
Пожалуйста, не забудьте правильно оформить цитату:
Губанов А. И. Промышленные сети для диагностики и управления [Текст] / А. И. Губанов, А. Б.  Николаев // Молодой ученый. — 2011. — №4. Т.3. — С. 14-18.
Николаев // Молодой ученый. — 2011. — №4. Т.3. — С. 14-18.
Билет 28. Протоколы уровня FieldBUS, основные требования, решаемые задачи, характеристики, режимы, топология связи.
|

 | ||||||||||
|


Билет 29. Коммуникация промышленных контроллеров. OPC сервер. Взаимодействие в АСУ ТП с использованием ОPC интерфейса.
Если сказать доступным языком, OPC-сервер - это программа работающая с протоколом OPC. Прочитать о том что такое OPC протокол можно на многих ресурсах (напрмер: wikipedia) для этого можете воспользоваться поисковиком и результат не заставит себя ждать. Его главное предназначение опрашивать контроллер (адреса памяти) по протоколу OPC и передавать данные полученные от контроллера на верхний уровень (например, в SCADA InTouch)
Описи сервер устанавливается на ПК который подсоединен физически к контроллеру. На нашей практике преобладает передача данных по Ethernet. В этом случае в корзине контроллера должен быть установлен коммуникационный модуль Ethernet, если же нет возможности установки модуля Ethernet, то используют стандартный порт контроллера RS 232 или RS 485 которые в большинстве случаев располагаются на процессорном модуле.
При необходимости в некоторых случаях используют преобразователи интерфейсов.
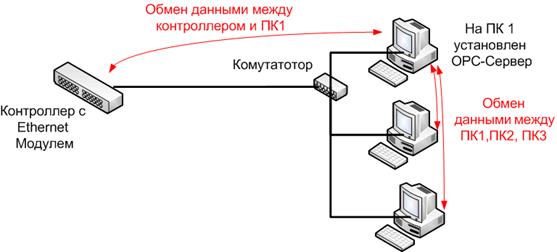
Рисунок 1 – Схема обмена данными по Ethernet с помощью OPC-сервера.
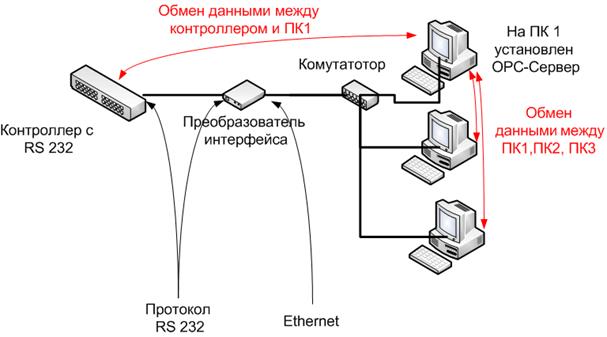
Рисунок 2 – Схема обмена данными через преобразователь интерфейса с помощью OPC-сервера.
Если Вы желаете по практиковаться, то рекомендуем вам начать знакомство с KEPServerEX, для понимания принципа работы Вам не понадобится подключать контроллер, KEPServerEX поддерживает режим симуляции входных сигналов. Производители промышленных контроллеров предлагают свои OPC-сервера:
- Allen-Bradley – RSLix
- DirectLogic – DSdate
Дополнительно скачать статьи одним архивом zip:
1. OLE for Process Control – свобода выбора (В статье рассматривается OLE for Process Control (OPC) — основной стандарт взаимодействия между программными компонентами современных систем сбора данных и управления (SCADA). Обсуждаются основные концепции стандарта, а также вопросы производительности и разработки OPCCсерверов.)
2. Система сбора и отображения информации с использованием ОРС и Интернетттехнологий (Авторы делятся опытом построения иерархической системы сбора и отображения информации «eXtenderOPC» с использованием SCADA GENESIS32. В качестве примера объектов внедрения в статье рассматриваются узлы учета нефти ОАО «Сибнефтепровод», являющегося подразделением акционерной компании «Транснефть». Показаны гибкость и новые возможности системы, появившиеся благодаря использованию ОРС и Интернетттехнологий.)
3. Система управления технологическим процессом приёмки нефти и отображения информации на базе ОРСС и Web-технологий (Рассматривается построение системы управления технологическим процессом, а также сбора и отображения информации с использованием SCADAAсистемы GENESIS32 и OPCCмашрутизатора SplitOPC на примере ПСП «Михайловка» ОАО «РИТЭК».)
4. Создание распределённых систем сбора данных на основе стандарта OPC (В статье рассматриваются вопросы, связанные с реализацией сложных, территориально распределённых систем сбора данных и управления на основе промышленных стандартов. В качестве одного из вариантов предлагается универсальное решение, построенное на базе стандарта OPC.)
5. Новые технологии работы с данными ОРС (В статье рассмотрены основные преимущества работы SCADAAсистем с данными ОРС, особенности и некоторые недостатки существующих протоколов передачи данных. Иллюстрация возможностей и решений осуществляется на базе новой версии пакета GENESIS32 V9 фирмы Iconics.)
Билет 30. Критерии оценки и перспективы развития современных коммуникаций промышленных контроллеров, примеры обобщенных архитектур АСУ ТП.