 2017-12-14
2017-12-14 1757
1757
Схема системы автоматического управления или регулирования, в которой функциональные элементы представлены типовыми динамическими звеньями, называется структурной схемой данной системы.
Структурную схему используют для теоретического исследования системы автоматического управления, так как она отображает ее динамические свойства. В структурных схемах элементарные динамические звенья чаще всего представляют их передаточными функциями.
На структурных схемах, в которых звенья представлены передаточными функциями, все воздействия следует указывать в виде лапласовых изображений.
Основным условием преобразования структурной схемы в эквивалентную является неизменность динамических характеристик системы.
Теория преобразования структурных схем разработана Б. Н. Петровым. Она основывается на рассмотрении алгебраических уравнений, описывающих схемы передачи сигналов в системе. Здесь рассмотрены наиболее часто встречающиеся преобразования структурных схем путем перемещения точки разветвления (узла) и сумматора. Перенос может осуществляться как в направлении распространения воздействия, так и против направления распространения воздействия.
Перенос узла через звено в направлении распространения воздействия в системе с передаточной функцией

выполняется на основании представления этой передаточной функции в таком виде:
Передаточная функция представляет параллельно-встречное соединение звеньев с неединичной обратной связью, в котором в прямой цепи включены последовательно два звена с передаточными функциями W1 (s) и W2(s), а в цепи обратной связи — звено с передаточной функцией 1/[W2 (s)].
Перенос узла через звено против распространения воздействия выполнен на основании преобразования передаточной функции исходной системы

к виду

Исходные и эквивалентные схемы переноса узла через звено приведены в таблице 1.5, п. 1.
Правила структурных преобразований
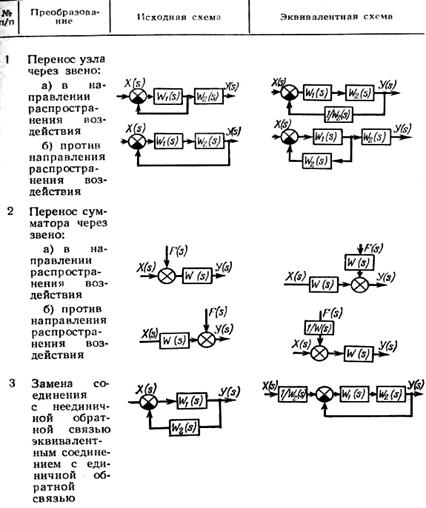
Перенос сумматора через звено в направлении распространения воздействия и против распространения воздействия показан в п. 2 (табл. 1.5).
Для исходной схемы изображение выходной величины следующее:

Изображение выходной величины остается таким же и для эквивалентной схемы, так как, раскрывая скобки уравнения (1.177), получаем

Из этого следует, что при переносе сумматора через звено в направлении распространения воздействия необходимо в цепь воздействия по второму входу суммирующего устройства включить звено с передаточной функцией того звена, через которое выполнен перенос.

преобразуется к виду

которому соответствует эквивалентная схема с перенесенным сумматором.
При переносе сумматора через звено против распространения воздействия изображение выходного сигнала
При переносе сумматора через звено против распространения воздействия следует включить в цепь воздействия по второму входу сумматора звено с передаточной функцией, обратной передаточной функции того звена, через которое выполнен перенос.
Замена соединения с неединичной обратной связью эквивалентным соединением с единичной обратной связью представлена в п. 3 таблицы 1.5. Замена выполняется на основании преобразования передаточной функции соединения с неединичной обратной связью, передаточная функция которого
Умножив числитель и знаменатель уравнения (1.181) на W2(s), получим эквивалентное уравнение

В результате получаем соединение двух звеньев, одно из которых не имеет обратной связи, а второе — с единичной обратной связью. Передаточная функция первого звена обратная передаточной функции звена обратной связи исходной схемы, а передаточная функция звена с единичной связью имеет в прямой цепи последовательное соединение звеньев W1(s) и W2(s).

