 2017-12-14
2017-12-14 2877
2877При определении передаточной функции разомкнутой системы контур регулирования предполагают разомкнутым около элемента сравнения, как показано на рисунке 1.44, а волнистыми линиями.
Передаточная функция разомкнутой системы определяется отношением лапласова изображения Y0(s) сигнала обратной связи yo(t) к лапласову изображению X0(s) задающего воздействия xo(t) при нулевых начальных условиях:

Передаточная функция W(s) характеризует собственные динамические свойства системы. Она, в частности, используется для получения характеристического многочлена разомкнутой и замкнутой системы.
Передаточная функция замкнутой системы относительно задающего воздействия определяется в предположении, что других внешних воздействий в системе нет, то есть f(t)=0.
Передаточная функция замкнутой системы относительно задающего воздействия определяется отношением лапласова изображения Y (s) выходной величины y(t) к лапласову изображению X0(s) задающего воздействия xa(t) при нулевых начальных условиях:

Передаточная функция Wx(s) характеризует передачу системой задающего воздействия и его воспроизведение регулируемой величиной.
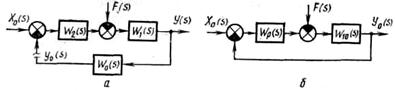
Рис. Структурные схемы САУ:
а—замкнутой системы автоматического управления; б —в стандартном виде «объект—регулятор».
Передаточная функция замкнутой системы относительно возмущающего воздействия определяется в предположении, что других внешних воздействий в системе нет, то есть xo(t)=0.
Передаточная функция замкнутой системы относительно возмущающего воздействия определяется отношением лап-ласова изображения Y (s) выходной величины y(t) к лап-ласову изображению F(s) возмущения f(t) при нулевых начальных условиях:

Передаточная функция Wf (s) показывает влияние возмущения f(t) на регулируемую величину у (t). Возмущение отклоняет регулируемую величину от требуемого значения и понижает точность воспроизведения задающего воздействия, оказывая таким образом вредное влияние на процесс регулирования. Степень этого влияния определяется величиной Wf(s): чем ближе эта величина к нулю, тем меньше влияние.
В качестве примера рассмотрим систему автоматического регулирования, передаточные функции элементов структурной схемы которой соответственно равны:

Передаточная функция разомкнутой системы имеет вид

Передаточная функция замкнутой системы относительно задающего воздействия

относительно возмущения

Рассматривая передаточные функции для приведенного примера, обратим внимание на то, что характеристический многочлен замкнутой системы равен сумме многочленов, расположенных в числителе и в знаменателе передаточной функции разомкнутой системы. Этим свойством пользуются при расчетах, так как определить передаточную функцию разомкнутой системы менее сложно, чем замкнутой.
Если в приведенной схеме системы воспринимающий элемент условно отнести к управляемому объекту, а звенья, формирующие закон регулирования или алгоритм управления, будут составлять регулятор, то структурная схема приводится к стандартному виду «объект — регулятор». Такая структурная схема показана на рисунке 1.44, б, где Wp(s) — W2(s) — передаточная функция регулятора; W10(s) = W1(s)W0(s) — передаточная функция управляемого объекта, куда условно отнесен и воспринимающий элемент. Тогда выходной величиной системы является не сама регулируемая величина y(t), а величина сигнала на выходе воспринимающего элемента yo(t). Но это не создает существенных трудностей в определении регулируемой величины, так как изображение выходной величины находят из соотношения

где W0(s) — передаточная функция воспринимающего элемента.
Передаточные функции системы автоматического регулирования используют для получения частотных передаточных функций и построения частотных характеристик соответственно разомкнутой и замкнутой системы.
Лекция 15

