 2017-10-31
2017-10-31 3520
3520SCADA - система обычно содержит следующие подсистемы:
1. Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) - инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им.
2. Диспетчерская система - собирает данные о процессе и отправляет команды процессу (управление).
3. Абонентский оконечный блок, либо УСО (RTU, англ. Remote Terminal Unit), подсоединяемый к датчикам процесса. Преобразует сигнал с датчика в цифровой код и отправляет данные в диспетчерскую систему.
4. Программируемый логический контроллер (PLC, англ. Programmable Logic Controller) используется как полевое устройство из-за экономичности, универсальности и гибкости нежели RTU специального назначения.
5. Коммуникационная инфраструктура для соединения диспетчерской системы с RTU.
Основная задача SCADA – это сбор информации о множестве удаленных объектов, поступающей с пунктов контроля, и отображение этой информации в едином диспетчерском центре. Кроме этого, SCADA должна обеспечивать долгосрочное архивирование полученных данных. При этом диспетчер зачастую имеет возможность не только пассивно наблюдать за объектом, но и ограниченно им управлять, реагируя на различные ситуации.
Все современные SCADA-системы включают три основных структурных компонента (см. рисунок 4.1):

Рисунок 4.1 - Основные компоненты SCADA-систем
Remote Terminal Unit (RTU) - это удаленный терминал, подключающийся непосредственно к контролируемому объекту и осуществляющий обработку задачи (управление) в режиме реального времени. Спектр воплощений RTU широк: от примитивных датчиков, осуществляющих съем информации с объекта, до специализированных многопроцессорных отказоустойчивых вычислительных комплексов, осуществляющих обработку информации и управление в режиме жесткого реального времени. Конкретная его реализация определяется спецификой применения. Использование устройств низкоуровневой обработки информации позволяет снизить требования к пропускной способности каналов связи с центральным диспетчерским пунктом.
Master Terminal Unit (MTU), Master Station (MS) - диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени. Одна из основных функций – обеспечение человеко-машинного интерфейса (между человеком-оператором и системой). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде: от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы. Устройство MTU часто называют SCADA-сервером.
Communication System (CS) коммуникационная подсистема (каналы связи) между RTU и MTU (Communication Equipment – коммуникационная среда). Она необходима для передачи данных с удаленных точек (RTU) на центральный интерфейс диспетчера и передачи сигналов управления обратно с MTU на RTU. В качестве коммуникационной системы можно использовать следующие каналы передачи данных: выделенные линии (собственные или арендованные); медный кабель или оптоволокно; частные радиосети; аналоговые телефонные линии; цифровые ISDN сети; сотовые сети GSM (GPRS).
С целью дублирования линий связи устройства могут подключаться к нескольким сетям, например к выделенной линии и резервному радиоканалу.
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, расположенных на больших областях (между промышленной установкой и потребителем). Большинство управляющих воздействий выполняется автоматически RTU или PLC.
Первостепенные функции управления обычно ограничиваются по уровням отмены или контролирующему вмешательству. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уставку для потока, и установить условия сигнализации, такие как - потеря потока и высокая температура, которые должны быть отображены и записаны. Цикл управления с обратной связью проходит через RTU или PLC, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает - показания измерительного прибора и отчеты о состоянии оборудования, соединенного со SCADA, по мере надобности. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения - корректировать или прервать стандартное управление средствами RTU (PLC). Данные могут также быть помешены в историю, часто основанную на СУБД, для построения трендов и другой аналитической обработки накопленных данных.
SCADA-системы решают ряд задач:
1. Обмен данными с УСО (устройства связи с объектом, то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
2. Обработка информации в реальном времени.
3. Отображение информации на экране монитора в понятной для человека форме.
4. Ведение базы данных реального времени с технологической информацией.
5. Аварийная сигнализация и управление тревожными сообщениями.
6. Подготовка и генерирование отчетов о ходе технологического процесса.
7. Осуществление сетевого взаимодействия между SCADA ПК.
8. Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
Алармы и события
Базовый набор функций SCADA-систем предопределен ролью программного обеспечения в системах управления (HMI) и реализован практически во всех пакетах. К основным функциям SCADA-систем относятся:
сбор информации с устройств нижнего уровня (датчиков, контроллеров);
прием и передача команд оператора/диспетчера на контроллеры и исполнительные устройства (дистанционное управление объектами);
сетевое взаимодействие с информационной системой предприятия;
отображение параметров технологического процесса и состояния оборудования с помощью мнемосхем, таблиц, графиков и т.п. в удобной для восприятия форме;
оповещение эксплуатационного персонала об аварийных ситуациях и событиях, связанных с контролируемым технологическим процессом и функционированием программно-аппаратных средств АСУ ТП с регистрацией действий персонала в аварийных ситуациях;
хранение полученной информации в архивах;
представление текущих и накопленных (архивных) данных в виде графиков (тренды);
вторичная обработка информации;
формирование сводок и других отчетных документов по созданным на этапе проектирования шаблонам.
Возможности по предоставлению информации эксплуатационному персоналу об аварийных ситуациях и событиях обеспечиваются подсистемами сигнализации. Такие подсистемы – обязательный компонент любого SCADA-пакета, но механизмы их реализации различны. Поддерживаемые типы алармов (тревог), приоритеты, возможности по фильтрации алармов (группировка), механизмы вывода информации об алармах, удобство конфигурирования системы алармов и т. п. – вот далеко не полный перечень характеристик подсистемы сигнализации.
Аларм (состояние тревоги) – это сообщение, формируемое системой управления и имеющее целью привлечь внимание оперативного персонала о возникновении ситуации, которая может привести к нарушению технологического процесса или более серьезным последствиям. Степень важности того или иного аварийного сообщения зависит от последствий, к которым может привести нарушение, вызвавшее данное аварийное сообщение. Наиболее важные аварийные сообщения могут потребовать вмешательства оперативного персонала. Поэтому для большинства аварийных сообщений, сформированных системой, требуется подтверждение (квитирование) их получения оператором/диспетчером.
Наряду с алармами в SCADA – системах существует понятие событий. Под событием следует понимать обычные статусные сообщения системы, не требующие подтверждения их получения и ответной реакции оператора. Обычно события генерируются при возникновении в системе определенных условий (регистрация оператора в системе, ввод информации оператором).
Причины, вызывающие состояние аларма, могут быть самыми разными:
- отказ аппаратных средств (датчиков, контроллеров, каналов связи);
- отказ технологического оборудования (насоса, двигателя и т. п.);
- выход параметров технологического процесса за заданные границы.
Все SCADA-системы поддерживают алармы двух типов: дискретные и аналоговые. Дискретные алармы срабатывают при изменении состояния дискретной переменной (кран открыт/закрыт, насос включен/выключен). По умолчанию дискретный аларм может срабатывать при переходе на 1 (ON) или на 0 (OFF), в зависимости от конкретного SCADA-пакета.
Аналоговые алармыбазируются на анализе выхода значений переменной за указанные верхние и нижние пределы. Аналоговые алармы могут быть заданы в нескольких комбинациях (рис.4.2): верхние пределы (предаварийный и аварийный); нижний пределы (предаварийный и аварийный); отклонение от заданного значения; скорость изменения параметра.
Для выхода переменной из состояния аларма необходимо, чтобы ее значение стало меньше порогового на величину, называемую зоной нечувствительности. Аналогично можно интерпретировать нижние предаварийные и аварийные алармы.
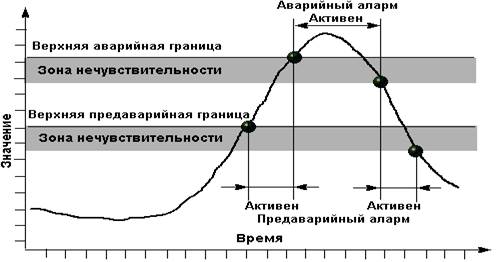
Рисунок 4.2 - Графическая интерпретация верхних предаварийного
и аварийного алармов
Предусмотрена возможность классификации алармов по самым различным признакам: по аппаратам технологического процесса, по типу алармов, имени, приоритету и т. д. В зависимости от этого каждый аларм может быть отнесен к определенной группе (зоне, категории). Подобная группировка – удобный способ фильтрации алармов и их обработки (подтверждение, способ вывода, формат, цвет и т. п.).
Вывод информации об аварийных ситуациях реализуется различными способами, в том числе, путем отображения на мнемосхемах интерфейса оперативного персонала: вывод в специальные текстовые поля; динамизация объектов (изменение цвета, мерцание и т.п.). Формат вывода информации, включаемой в аварийное сообщение, определяется на стадии проектирования. В строку аварийного сообщения можно включить текущую время и дату, тип аларма, его приоритет, имя переменной, ее текущее значение, зону нечувствительности, размерность, а также группу алармов и его состояние (подтвержден/неподтвержден). Для дискретных алармов можно создать поле on/off. Для алармов с метками времени в поле текущего времени можно выводить информацию с точностью до миллисекунд.
Контрольные вопросы по разделу 4
1. Актуальность SCADA-технологии
2. Концепция SCАDA
3. Управление технологическими процессами на основе систем SCADA
4. Подсистемы SCADA - систем
5. Основная задача SCADA
6. Основные структурные компоненты SCADA - систем
7. Remote Terminal Unit (RTU)
8. Master Terminal Unit (MTU), Master Station (MS) диспетчерский пункт управления
9. Communication System (CS) коммуникационная подсистема
10. Задачи SCADA – систем
11. Алармы, их типы
12. События








