 2017-12-14
2017-12-14 1294
12941. В том случае, если объект регулирования не обладает саморегулированием, устойчивость контура обеспечивается только автоматическим регулятором. В регуляторы таких объектов вводят специальные корректирующие звенья, которые стабилизируют их работу. Чаще всего в этих случаях в конструкцию регулятора вводится отрицательная обратная связь.
Стабилизирующее действие отрицательной обратной связи заключается в том, что она приостанавливает действие регулятора, несмотря на то, что регулируемый параметр еще не вернулся к первоначальному значению.
2. Обратные связи бывают жесткие и гибкие (изодромные).
Если воздействие обратной связи зависит только от выходной величины какого-либо звена регулятора и не зависит от времени, то такая обратная связь называется жесткой.
При введении жесткой обратной связи регулятор приходит в равновесное состояние при разных значениях регулируемого параметра, причем эти значения связаны с величиной хода регулирующего устройства.
Величина изменения регулируемого параметра в зависимости от хода регулирующего устройства называется неравномерностью регулятора или системы регулирования.Такие регуляторы и системы имеют наклонную статическую характеристику.
Абсолютное значение величины неравномерности  определяется по формуле
определяется по формуле  ….(17), где
….(17), где  - наибольшее значение регулируемого параметра при статическом режиме;
- наибольшее значение регулируемого параметра при статическом режиме;  - наименьшее значение регулируемого параметра при статическом режиме.
- наименьшее значение регулируемого параметра при статическом режиме.
Воздействие гибкой (изодромной) обратной связи полностью снимается после окончания переходного процесса, т. е. влияние этой обратной связи изменяется во времени и проявляется только в динамике, не сказываясь на статической характеристике регулятора (статическая характеристика изодромных регуляторов горизонтальна). Гибкая обратная связь в регуляторах осуществляется путем введения в конструкцию специального устройства - изодрома.
3. Принцип действия и статические характеристики регуляторов.
3.1. На рис. 40, а приведены схема и статическая характеристика поплавкового регулятора уровня прямого действия.
Регулятор предназначен для поддержания уровня в емкости 6 в пределах от  до
до  . При верхнем уровне поплавок находится в верхнем положении и через рычаг 4, уплотненный сильфоном 2, полностью прикрывает регулирующий клапан 5, т. е. ход клапана
. При верхнем уровне поплавок находится в верхнем положении и через рычаг 4, уплотненный сильфоном 2, полностью прикрывает регулирующий клапан 5, т. е. ход клапана  . При открытии клапана 7 на отводе жидкости уровень начинает уменьшаться. При этом поплавок 1 опускается вниз, поворачивая рычаг 4 вокруг опоры 3, и приоткрывает регулирующий клапан 5, обеспечивая подачу жидкости в резервуар 6. При полностью открытом клапане 7 на отводе жидкости уровень в резервуаре падает до минимального значения
. При открытии клапана 7 на отводе жидкости уровень начинает уменьшаться. При этом поплавок 1 опускается вниз, поворачивая рычаг 4 вокруг опоры 3, и приоткрывает регулирующий клапан 5, обеспечивая подачу жидкости в резервуар 6. При полностью открытом клапане 7 на отводе жидкости уровень в резервуаре падает до минимального значения  , а клапан 5 на подводе жидкости открывается полностью, т. е. его ход соответствует
, а клапан 5 на подводе жидкости открывается полностью, т. е. его ход соответствует  .
.
Статическая характеристика регулятора построена в координатах уровень  (положение поплавка) ход регулирующего клапана
(положение поплавка) ход регулирующего клапана  на подводе жидкости. Из анализа работы регулятора следует, что он поддерживает максимальный уровень
на подводе жидкости. Из анализа работы регулятора следует, что он поддерживает максимальный уровень  при полностью закрытом регулирующем клапане, когда его ход
при полностью закрытом регулирующем клапане, когда его ход  , и минимальный уровень
, и минимальный уровень  при полностью открытом регулирующем клапане, когда его ход
при полностью открытом регулирующем клапане, когда его ход  . Эта зависимость и выражена в его статической характеристике. Рассматриваемый регулятор прямого действия поддерживает уровень в резервуаре с определенной статической неравномерностью
. Эта зависимость и выражена в его статической характеристике. Рассматриваемый регулятор прямого действия поддерживает уровень в резервуаре с определенной статической неравномерностью  .
.
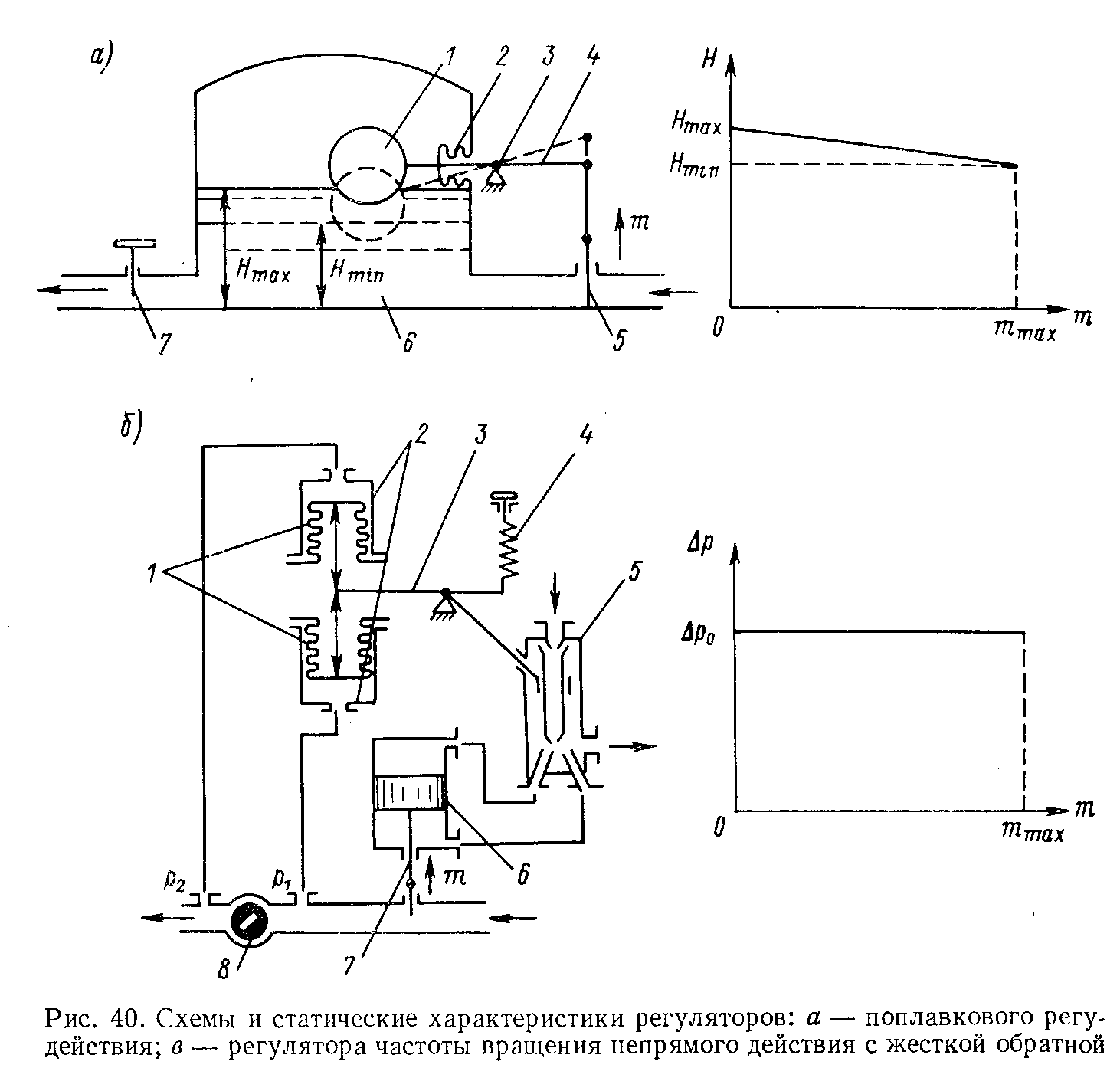
Рис. Схемы и статические характеристики регуляторов: а) – поплавкового регулятора уровня прямого действия; б) – регулятора перепада давления непрямого действия.
3.2. На рис. 40, б приведены схема и статическая характеристика гидравлического регулятора перепада давлений непрямого действия со струйным усилительным устройством. Регулятор выполнен без введения стабилизирующего устройства (обратной связи). Он обеспечивает поддержание постоянного перепада давлений 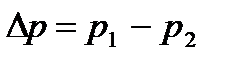 на клапане 8 на всех режимах работы без статической неравномерности.
на клапане 8 на всех режимах работы без статической неравномерности.
При открытии золотника 8 перепад давлений на нем уменьшится, причем вследствие разности давлений  сильфоны 1, заключенные в корпусах 2, повернут рычаг 3, что приведет к отклонению струйной трубки усилительного устройства 5 вправо. При этом жидкость поступит в нижнюю полость сервомотора 6 и регулирующий клапан 7 переместится вверх. Перемещение будет происходить до тех пор, пока перепад давлений
сильфоны 1, заключенные в корпусах 2, повернут рычаг 3, что приведет к отклонению струйной трубки усилительного устройства 5 вправо. При этом жидкость поступит в нижнюю полость сервомотора 6 и регулирующий клапан 7 переместится вверх. Перемещение будет происходить до тех пор, пока перепад давлений  не станет равным первоначально заданному значению
не станет равным первоначально заданному значению  . При этом восстановится равновесие сил на рычаге 3, он вернется в исходное положение, и связанная с ним струйная трубка займет среднее положение, прекратив подачу жидкости в сервомотор.
. При этом восстановится равновесие сил на рычаге 3, он вернется в исходное положение, и связанная с ним струйная трубка займет среднее положение, прекратив подачу жидкости в сервомотор.
При закрытии клапана 8 процесс пойдет в обратном направлении до тех пор, пока  не станет равно
не станет равно  . Величина первоначального перепада
. Величина первоначального перепада  задается с помощью изменения натяжения пружины 4, усилие которой компенсирует разность давлений
задается с помощью изменения натяжения пружины 4, усилие которой компенсирует разность давлений  на сильфонах I. Статическая характеристика такого регулятора будет горизонтальной, так как при любом положении регулирующего клапана от нуля до
на сильфонах I. Статическая характеристика такого регулятора будет горизонтальной, так как при любом положении регулирующего клапана от нуля до  перепад давлений будет поддерживаться постоянным и равным
перепад давлений будет поддерживаться постоянным и равным  .
.
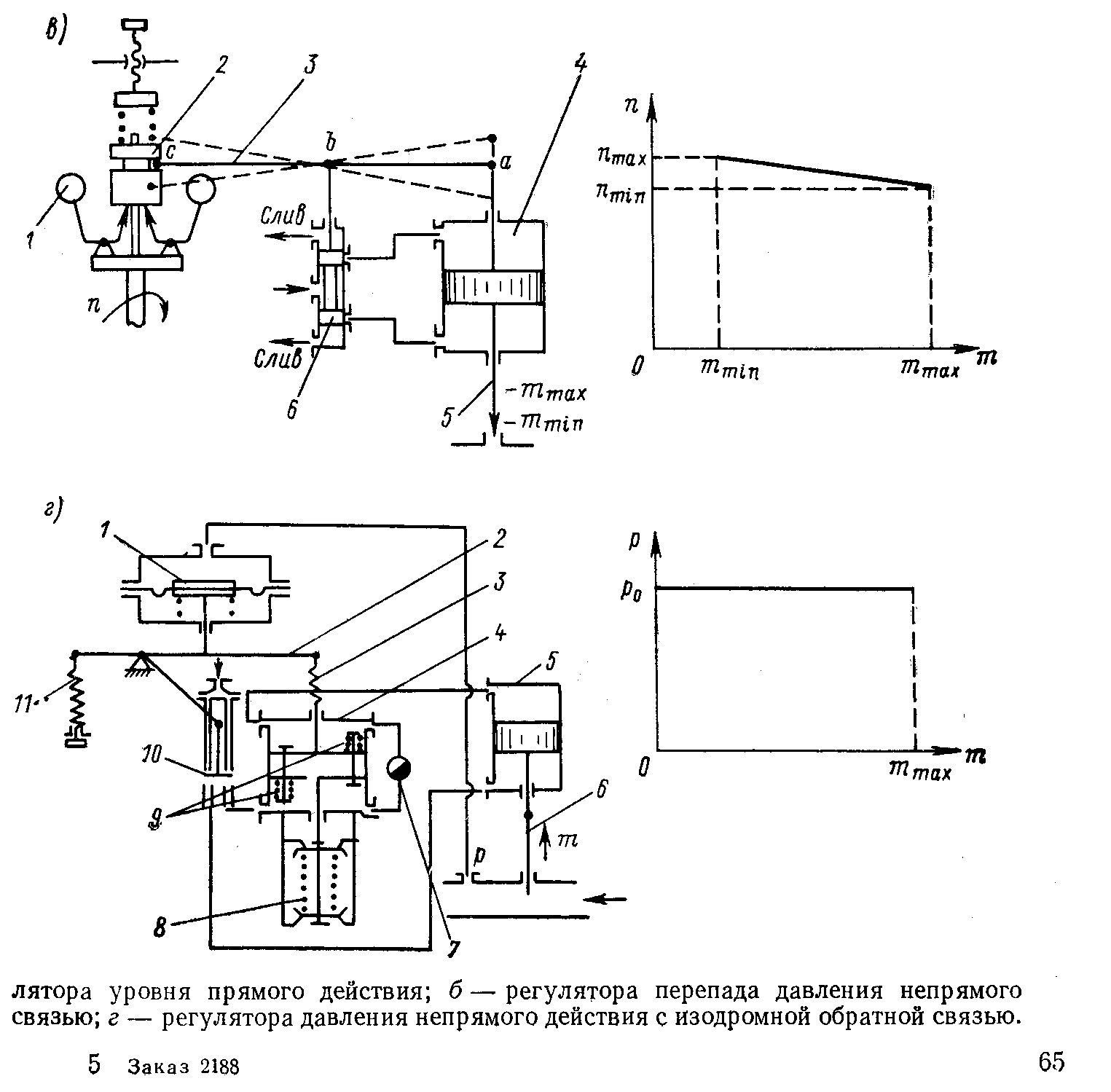
Рис. Схемы и статические характеристики регуляторов: в) – регулятора частоты вращения непрямого действия с жесткой обратной связью; г) – регулятора давления непрямого действия с изодромной обратной связью.
3.3. На рис. 40, в дана схема и статическая характеристика регулятора частоты вращения с жесткой обратной связью. При изменении частоты вращения изменяется положение грузов 1 датчика и перемещается муфта 2. При этом рычаг 3 поворачивается вокруг точки а, смещая золотник 6 из среднего положения. В результате сервомотор 4 приходит в движение и перемещает регулирующее устройство 5, воздействующее на подачу энергии к объекту регулирования. Одновременно рычаг 3, жестко связанный с поршнем сервомотора 4, поворачивается относительно точки с его соединения с муфтой 2 датчика. Золотник 6 возвращается при этом в среднее положение, и сервомотор 4 останавливается (выключается).
Нетрудно заметить, что новое равновесное состояние регулятора наступит при другом положении рычага 3, т. е. при несколько ином значении регулируемого параметра n, обусловленном другим положением муфты 2 и грузиков 1 датчика. Таким образом, регулятор как бы перенастраивается на поддержание различных значений регулируемого параметра при изменении положения регулирующего устройства и при сохранении неизменным положения золотника 6 и точки b рычага 3.
Из статической характеристики регулятора видно, что величина изменения заданного значения регулируемого параметра - неравномерность регулятора  составляет
составляет 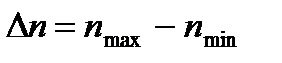 и соответствует полному ходу регулирующего устройства
и соответствует полному ходу регулирующего устройства  .
.
Очевидно, что чем больше неравномерность регулятора, тем сильнее стабилизирующее воздействие обратной связи. В том случае, если для обеспечения устойчивой работы контура регулирования должна быть принята неравномерность, превышающая допустимые пределы изменения регулируемого параметра, применяют гибкие (изодромные) обратные связи.
3.4. На рис. 40, г показана схема гидравлического регулятора давления с изодромной обратной связью. Натяжение пружины обратной связи 3 в этом случае изменяется не сервомотором, а специальным устройством - гидравлическим изодромом 4, включенным последовательно с сервомотором 5 в один из трубопроводов рабочей жидкости. Изодром 4 представляет собой сервомотор, шток которого с одной стороны связан с пружиной обратной связи 3, а с другой стороны с пружиной нулевого положения 8, которая сжимается при отклонении поршня изодрома 4 от среднего положения. Полости изодрома 4 соединены между собой каналом с дросселем 7.
При отклонении давления от заданного значения, установленного натяжением пружины 11, усилие на мембране 1 датчика изменяется и нарушается равновесие сил на рычаге 2. Он поворачивается и отклоняет связанную с ним заслонку 10 усилительного устройства. Под действием возникшего при этом перепада давлений рабочей жидкости поршень сервомотора 5 начинает двигаться, перемещая регулирующий клапан 6. В силовом трубопроводе появляется расход рабочей жидкости и на дросселе 7 изодрома возникает перепад давлений, под действием которого поршень изодрома 4 смещается из среднего положения, изменяя натяжение пружины обратной связи 3 в сторону восстановления равновесия рычага 2.
После остановки поршня сервомотора 5 перепад давления на поршне изодрома 4 исчезает и под действием нулевой пружины 8 поршень изодрома возвращается в среднее положение, восстанавливая прежнее натяжение пружины обратной связи 3.
Таким образом, натяжение пружины обратной связи 3 изменяется только при движении поршня сервомотора 5 и не зависит от положения поршня и регулирующего клапана 6 на установившихся режимах. Такой регулятор не имеет неравномерности и его статическая характеристика горизонтальна, т. е. давление  при любых положениях регулирующего устройства, от нуля до
при любых положениях регулирующего устройства, от нуля до  .
.
В реальных регуляторах объем изодрома обычно меньше объема сервомотора. Поэтому в поршне изодрома устанавливают перепускные клапаны 9, позволяющие поршню сервомотора двигаться после того, как поршень изодрома достигнет упора. В этом случае при открытых перепускных клапанах 9 регулятор работает как обычный регулятор без обратной связи.
Использование изодромной обратной связи с воздействием изодрома на пружину обратной связи позволяет располагать датчик и усилительное устройство отдельно от исполнительного и регулирующего устройств, в то время как регуляторы с жесткой обратной связью должны быть выполнены в виде единой конструкции. Однако применение изодромной обратной связи усложняет конструкцию регуляторов, их наладку и эксплуатацию.

