 2017-12-16
2017-12-16 917
917Тема 1.8 Урок 2.
- Втрати потужності та ККД асинхронного двигуна
Потужність, що споживається двигуном

де m1 --кількість фаз обмотки статора.
Потужність на валу двигуна (корисна потужність):

Рівняння енергетичного балансу має вигляд:
де ∑ Р —сумарні втрати.
ККД асинхронного двигуна:

Звичайно втрати в електричних машинах вивчають за енергетичними діаграмами.
На рис.1 наведено енергетичну діаграму асинхронного двигуна. З енергетичної діаграми випливає висновок про втрати потужності:
а) Pe1 – електричні втрати у статорі;
б) PМ1- магнітні втрати у статорі;
в) Pе2- електричні втрати у роторі;
г) PМ2- магнітні втрати у роторі;
д) PТ- втрати від тертя та на охолодження машини.
Електромагнітна потужність визначається співвідношеннями:
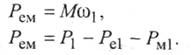

Мал.1
Механічна потужність:

ККД двигуна:

а струм, що споживається двигуном,

Чим більший cosφ1 (коефіцієнт потужності), тим меншим буде струм, що споживає двигун. У асинхронних двигунів звичайно соsф1= 0,75...0,95. Намагаються робити малі зазори між статором і ротором. Це зменшує індуктивність та реактивну потужність, тобто збільшує соsф1.
Загальні втрати у двигуні залежать від навантаження, тому й ККД двигуна залежить від його навантаження (рис.2). Двигуни конструюються таким чином, що максимальний ККД забезпечується при навантаженні, дещо меншому за номінальне. Звичайно ККД асинхронних двигунів досить високий і сягає 80...90%. У потужних двигунах ККД вищий й досягає 90...96%.
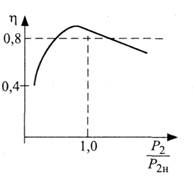
Мал. 2
- Електромагнітний момент
У статор асинхронного двигуна надходить із мережі потужність:

Частина цієї потужності втрачається у статорі (електричні та магнітні втрати статора). У ротор надходить електромагнітна потужність

де М— електромагнітний або обертальний момент асинхронного двигуна. Якщо врахувати втрати потужності у роторі, то механічну потужність можна визначити за аналогічною формулою:

Електромагнітна потужність більша за механічну на величину втрат у роторі. Оскільки магнітні втрати у роторі наближаються до нуля,

де тг — число фаз обмотки ротора.
Втрати у роторі можна визначити за допомогою ЕРС і струму обмотки ротора:

де ψ2 — зсув фаз між ЕРС та струмом.
За рівнянням трансформаторної ЕРС

електромагнітний момент можна визначити за формулою

 Величина
Величина
називається сталою машини і залежить тільки від конструктивних особливостей машини. Тому остаточний вираз електромагнітного моменту має вигляд:

Електромагнітний момент асинхронного двигуна пропорційний магнітному потоку та струму ротора. Треба враховувати, що

Поряд з терміном «електромагнітний момент» часто вживається термін «обертальний момент». Взагалі це не одне й те саме. Обертальний момент на валу двигуна дещо менший за електромагнітний через механічні та додаткові втрати. В машинах середньої та великої потужності ці втрати порівняно невеликі. Якщо ними нехтувати, то можна вважати, що обертальний момент дорівнює електромагнітному.
- Механічна характеристика
При аналітичних дослідженнях асинхронних машин використовується залежність електромагнітного моменту від ковзан
ня (рис.3). Як й усі електричні машини, асинхронна машина оборотна. У режимі 0 < S < 1 вона працює як двигун. За негативними значеннями ковзання (швидкість ротора більша за швидкість обертання поля) машина працює як генератор. Якщо зовнішня сила обертає ротор проти напрямку обертання поля ( S > 1), то машина працює як електромагнітне гальмо. При цьому електромагнітний момент перешкоджатиме обертанню ротора.
Можна розглядати зв'язок електромагнітного моменту із ковзанням тільки для режиму двигуна (рис.4). Ця крива має явний максимум при критичному ковзанні. Цей максимум поділяє криву на області стійкої і нестійкої роботи. Звичайно номінальне значення ковзання S - 0,02...0,05, критичне ковзання S =0,1...0,2. При S= 1 -- пуск двигуна. Пусковий момент звичайно менший за номінальний.

Мал..3

Мал..4
Тому необхідно, щоб момент опору був меншим за пусковий, тобто Мп > MQ. Таким чином, двигун доцільно пускати розвантаженим. Можна розглянути роботу двигуна в області стійкої роботи (точка 1) та в області нестійкої роботи (точка 2):
— у точці 1 збільшення M0 зменшує оберти n2, збільшує S, тобто
збільшується електромагнітний момент (це стійка робота);
---у точці 2 збільшення MQ зменшує електромагнітний момент, тобто
М < М0 і ротор зупиниться. Це нестійка робота.
Механічна характеристика — це залежність швидкості обертання ротора від електромагнітного моменту, тобто n2 = f {M). Цю залежність можна одержати перебудовою залежності М =f(S) у інші координати (рис.5).
Режим двигуна здійснюється тоді, коли  :
:
0<n2<n1
Якщо швидкість обертання ротора більша за швидкість обертання поля (n2 >n1), то здійснюється режим генератора. За режимом електромагнітного гальма ротор і поле обертаються в різні боки (n2 < 0).
Механічна характеристика асинхронного двигуна наведена на рис. 6 При п2 = О здійснюється пуск двигуна. При S = 0 (ротор наздогнав поле) п2 = n1 та M=0.
У межах 0 < S < Sкр швидкість обертання незначно залежить від моменту опору. Ця частина характеристики вважається жорсткою. У межах Sкр < S < 1 механічна характеристика  відповідно м 'яка.
відповідно м 'яка.
Мал.. 5
Мал.. 6
Звичайно у асинхронних двигунах номінальний момент складає:

Максимальний момент незалежить від активного опору ротора .
Стійкість роботи двигуна характеризується його перевантажувальною спроможністю

Для двигунів з короткозамкненим ротором λ = 1,7...2,8. Критичне ковзання можна також визначити з формули Клосса:

- Регулювання швидкості обертання ротора
3 точки зору регулювання швидкості обертання ротора асинхронний двигун гірший за двигуни постійного струму. Звичайно асинхронні двигуни застосовуються у нерегульованих приводах.
Двигун з фазним ротором регулюється введенням реостата. При цьому зменшуються оберти n1. Це дуже неекономічно, бо збільшуються втрати на додатковому опорі. Регулюючі реостати звичайно розраховують на тривалий режим роботи та регулюють оберти
у діапазоні до трьох разів.
Згідно із співвідношенням

регулювати швидкість обертання ротора короткозамкненого двигуна можна двома способами.
1. Зміною числа пар полюсів. Виводи котушок статорної обмотки перемикаються на клемній дошці. В залежності від їх перемикання змінюється число пар полюсів. Цей спосіб дає змогу регулювати оберти ступінчасто.
2.  Зміною частоти струму живлення. Звичайно частоту регулю
Зміною частоти струму живлення. Звичайно частоту регулю
ють тиристорним перетворювачем частоти у межах
Недоліком цього способу є необхідність вмикання додаткового приладу та невеликі границі регулювання.
Щодо реверсування (зміни напрямку обертання ротора), то необхідно змінити напрям обертання магнітного поля. Це можна здійснити, якщо перемкнути два будь-які лінійні проводи, що з'єднують трифазну мережу із статором двигуна.
Пуск асинхронного двигуна
У асинхронного двигуна не дуже добрі пускові характеристики. При пускові під повною напругою виникають значні струми в обмотці статора, що у кілька (6...7) разів перевершують номінальні.
Це небезпечно і для двигуна, і для мережі змінного струму. Пусковий момент двигуна звичайно малий, тому при пускові двигун треба розвантажити. Задачу пуску розв'язують за допомогою штучного підвищення опору обмотки ротора. При цьому збільшується пусковий момент та зменшується пусковий струм.
Пуск двигуна з фазним ротором здійснюється введенням максимального опору реостата в обмотці фазного ротора. Після
розгону ротора поступово зменшують опір реостата. Інколи використовують ступінчастий реостат (пусковий додатковий та робо
чий опір).
Пуск короткозамкненого двигуна полегшується спеціальною конструкцією ротора у двигуні з витісненням струму. У роторі з глибоким пазом стержні «білячої клітки» виготовляються у
вигляді пластини і вкладаються у глибокий паз осердя ротора. Розподіл струму за глибиною паза залежить від індуктивності окремих
його частин. Потокозчеплення та індуктивність глибинної частини
стержня більша за потокозчеплення та індуктивність зовнішніх частин. Тому у момент пуску, коли частота струму у стержнях велика (дорівнює частоті обертового магнітного поля), індуктивний опір глибинних частин великий.  Відбувається «витіснення» струму у верхню частину стержня (рис.7). Таким чином, збільшується активний опір
Відбувається «витіснення» струму у верхню частину стержня (рис.7). Таким чином, збільшується активний опір
| Рис. 7 |
«білячого колеса» при пускові, поліпшуються пускові характеристики. У номінальному режимі роботи двигуна частота струму у стержнях мала, процес «витіснення» відсутній, активний опір стержня зменшується.
Стержні ротора з глибоким пазом  можна виготовляти різної форми (рис.8).
можна виготовляти різної форми (рис.8).
| Рис. 8 |
Ротор з подвійною «білячою кліткою» має два «білячих колеса». Верхня клітка виготовляєтся з латуні,нижня –з міді й має більший переріз.  У момент пуску струм витискається у верхню, латунну клітку, що має великий активний опір. Ця клітка називається пусковою. В усталеному режимі працює нижня, робоча клітка з малим активним опором (рис.9). У двигуна з витісненням струму пусковий момент може збільшуватись у три рази. Пусковий струм встановлюється у три-чотири рази більший за номінальний. Рис.9
У момент пуску струм витискається у верхню, латунну клітку, що має великий активний опір. Ця клітка називається пусковою. В усталеному режимі працює нижня, робоча клітка з малим активним опором (рис.9). У двигуна з витісненням струму пусковий момент може збільшуватись у три рази. Пусковий струм встановлюється у три-чотири рази більший за номінальний. Рис.9
За рахунок зниження напруги, що подається на обмотку статора, є змога зменшити пусковий струм. Зниження пускового струму спричиняє небажане зменшення і пускового моменту. Цей спосіб називається пуском при зниженій напрузі. Є кілька способів пуску при зниженій напрузі. Напругу зменшують або за допомогою додаткового приладу, або методом перемикання обмоток:
1) пуск за допомогою реактивної котушки;
2) пуск за допомогою реостата (активного опору);
3) автотрансформаторний пуск;
4) пуск перемиканням котушок обмотки статора з «трикутника»
(у номінальному режимі) на «зірку».
На жаль, усі ці способи знижують не тільки пусковий струм, а й пусковий момент.
- Синхронні електричні машини
Синхронною електричною машиною називається машина, у якій швидкість обертання ротора дорівнює швидкості обертання магнітного поля статора.
Синхронна електрична машина має зворотний принцип дії, тобто вона може використовуватися і як двигун, і як генератор.
Основними складовими частинами синхронної електричної машини є нерухома частина - - статор та обертова частина -ротор.
Статор синхронної електричної машини конструктивно не відрізняється від статора асинхронної машини.
За конструкцією ротори синхронних машин, які є електромагнітами, бувають двох типів: а) ротори з явно вираженими полюсами; б) ротори з неявне вираженими полюсами.
 На роторі синхронної машини розміщена обмотка збудження, яка за допомогою контактних кілець та щіток, накладених на них, з'єднана з стороннім джерелом постійного струму. Джерелом постійного струму може бути генератор постійного струму або джерело змінного струму, підключене до обмотки збудження через відповідний випрямляч. Таке стороннє джерело називається збудником.
На роторі синхронної машини розміщена обмотка збудження, яка за допомогою контактних кілець та щіток, накладених на них, з'єднана з стороннім джерелом постійного струму. Джерелом постійного струму може бути генератор постійного струму або джерело змінного струму, підключене до обмотки збудження через відповідний випрямляч. Таке стороннє джерело називається збудником.
Синхронні двигуни найчастіше використовуються у тих випадках, коли необхідна стабільна швидкість обертання: великі вентилятори, центробіжпі насоси, генератори постійного струму тощо.
Швидкість обертання ротора, яка дорівнює швидкості обертового магнітного поля, визначається за формулою:

де f — частота напруги мережі (для двигуна) або частота електрорушійної сили (для генератора); р — кількість пар полюсів електричної машини.
Величина діючого значення електрорушійної сили, яка індукується в одній фазі статора у режимі холостого ходу дорівнює:

де kоб1 - - обмотковий коефіцієнт, який враховує конструктивні особливості обмотки статора; w1 -- кількість витків однієї фази статора, які підключені послідовно; Фx — магнітний потік, створюваний обмоткою збудження ротора.
При роботі трифазної синхронної машини у ролі трифазного генератора останній утворює потужність, яку віддає навантаженню. Якщо навантаження симетричне, то потужність, яку трифазний генератор віддає цьому навантаженню, визначається за формулою:

де I — фазний струм генератора; U — фазна напруга генератора; соsф — коефіцієнт потужності.
Рівняння балансу потужностей трифазного генератора записується так:
де Рсм — електромагнітна потужність; Рс т — електрична потужність витрат в обмотці статора; R -- активний опір фаз обмотки статора.
Обертовий момент генератора описується співвідношенням:

де w — кутова швидкість обертання ротора генератора.
Коефіцієнтом корисної дії генератора змінного струму називається відношення корисної потужності PГ, яку віддає генератор навантаженню, до потужності РД, яка підводиться до генератора від двигуна.
Коефіцієнт корисної дії генератора визначається за формулою:

Відношення корисної потужності на валу синхронного електричного двигуна РВДдо поутжності РСДМ, яку споживає електродвигун від електричної мережі, називається коефіцієнтом корисної дії синхронного електродвигуна змінного струшу ηДЗС:

Синхронні генератори мають:
а) зовнішню характеристику, що характеризує залежність напруги на затискачах генератора від струму навантаження (активного або реактивного), якщо швидкість обертання ротора та струм збудження є сталими величинами. Тобто U = f (Iн) при п =const, Iзбудж=const;
б) регулювальну характеристику, яка показує, як необхідно змінити силу струму в обмотці збудження, щоб у випадку зміни навантаження генератора напруга на його затискачах і швидкість обертання ротора були сталими величинами. Тобто Iзбудж = f( IН ) при U = const, п = const.








