 2018-01-08
2018-01-08 921
921Для пояснения принципа действия работы И-регулятора аналогового типа рассмотрим работу регулятора типа РЭГ (регулятор электрогидравлический).
Интегральный регулятор, как отмечалось ранее, функционирует практически без остаточного отклонения (с учетом зоны нечувствительности используемых технических средств), но достаточно медленно. Увеличение быстродействия за счёт увеличения Кр1 (уменьшения Ти) приводит к возникновению колебательного режима работы.
В качестве примера технической реализации И-закона регулирования рассмотрим работу электрогидравлического регулятора.
В данном регуляторе для формирования сигналов о текущих заданном и действительном значениях регулируемого параметра и для формирования закона регулирования используется электрическая энергия, а для перемещения исполнительного механизма – гидравлическая энергия давления масла 8÷12 кГс/см2.
Принципиальная схема электрогидравлического регулятора представлена на рис.25*.
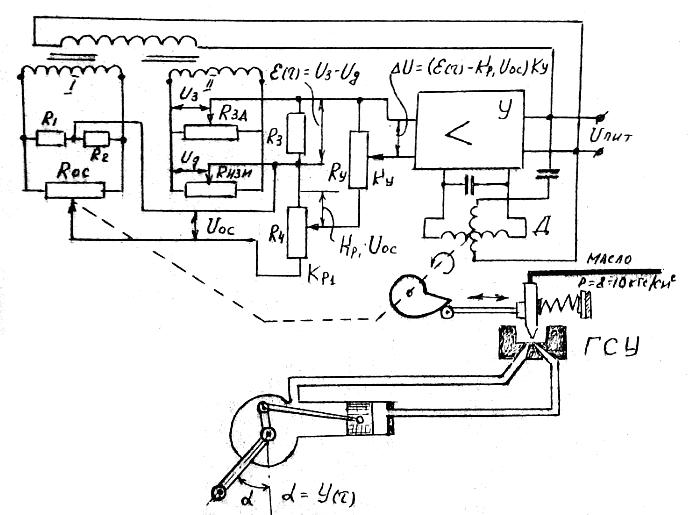
Рис 25*. Принципиальная схема интегрального электрогидравлического регулятора
ГСУ – гидравлический струйный усилитель
Входная электрическая схема регулятора содержит два моста: измерительный и мост обратной связи. Мосты питаются напряжением переменного тока.
С потенциометра Rзд снимается сигнал Uз, пропорциональный заданному текущему значению регулируемого параметра.
С потенциометра Rизм, встроенного в прибор и измеряющего текущее значение регулируемого параметра, снимается сигнал Uд, пропорциональный действительному текущему значению регулируемого параметра.
На сопротивлении Rз формируется сигнал рассогласования ε(τ), равный разности сигналов Uд и Uз, т.е. ε(τ)=Uз(τ) - Uд(τ).
Мост обратной связи содержит два равных сопротивления R1 и R2 (для формирования средней точки напряжения питания моста) и сопротивление Rос, движок которого механически связан с валом двигателя Д. На выходе моста формируется напряжение обратной связи Uос, часть которого Kр1*Uoc сравнивается с напряжением рассогласования ε(τ). При среднем положении движка Rос значение Uос равно нулю.
На вход электронного усилителя подается сигнал ΔU=Ky(ε(τ) – Kp1*Uoc). Сопротивление Ry определяет значение масштабного коэффициента Ky, задающего чувствительность регулятора.
При наличии сигнала ΔU он усиливается до величины, достаточной для перемещения конденсаторного двигателя Д, включенного на выходе усилителя У. двигатель Д при вращении поворачивает профилированное лекало, воздействующее на перемещение струйной трубки гидравлического струйного усилителя – ГСУ и перемещает в соответствующем направлении движок реостата обратной связи Кос. При смещении движка со среднего положения появляется сигнал обратной связи Uос.
Направление вращения двигателя выбрано таким, чтобы сигнал Кр1*Uос компенсировал сигнал рассогласования ε(τ) и в момент равенства сигнала ΔU нулю на входе усилителя двигатель останавливается, т.е. обеспечивается условие ε(τ) = Kp1*Uoc.
Одновременно лекало (профилированный кулачок), поворачиваясь, отклоняет струйную трубку ГСУ от среднего положения на величину, пропорциональную рассогласованию ε(τ).
При отклонении струйной трубки ГСУ от среднего положения гидравлический поршневой кривошипный исполнительный механизм начинает перемещаться со скоростью, пропорциональной отклонению струйной трубки, а значит и величине ε(τ).
При отклонении струйной трубки от среднего положения образуется разность давлений в сопловых отверстиях ГСУ и линиях к ИМ.
Исполнительный механизм начинает перемещаться со скоростью, пропорциональной величине разности давлений, т.е. отклонению трубки от среднего положения.
По мере движения ИМ величина ε(τ) начинает уменьшаться, т.е. значение ΔU меняет свой знак, изменение фазы сигнала ΔU на входе усилителя заставит двигатель Д перемещаться в обратном направлении, и по мере достижения величиной Uд значения Uз, струйная трубка и движок реостата Roc снова вернутся в исходное среднее положение. Двигатель останавливается, процесс регулирования закончен.
Недостатком И-регулятора является необходимость точного согласования скорости ИМ и инерционных свойств объекта. Поэтому эти регуляторы не обеспечивают необходимой оперативности (быстроты) управления. Стремление увеличить скорость ИМ для повышения оперативности приводит к возникновению существенных колебаний регулируемой величины. Поэтому чисто интегральные регуляторы в настоящее время используются достаточно редко. Да и сложно электрически точно выполнить условие dY/dτ=Кр1*ε(τ) при применении в ИМ асинхронных двигателей с короткозамкнутым ротором. Однако при использовании частотных преобразователей для управления асинхронными двигателями реализация интегрального закона управления в ближайшем будущем будет обеспечено.








