 2018-01-08
2018-01-08 603
603
Вихідними даними для розрахунків є двигун постійного струму потужністю  ;
;  ,
,  ,
,  ,
,  ,
,  ,
,  і функціональна схема, наведена на рис.3.1. На схемі:
і функціональна схема, наведена на рис.3.1. На схемі:  - задавач швидкості;
- задавач швидкості;
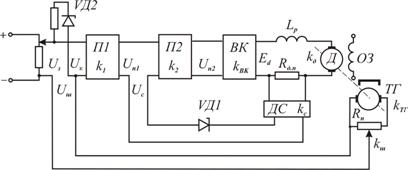
Рис.3.1
 і
і  - підсилювачі напруги з коефіцієнтами підсилення
- підсилювачі напруги з коефіцієнтами підсилення  і
і  ;
;  - випрямляч керований з системою фазо-імпульсного керування і коефіцієнтом підсилення
- випрямляч керований з системою фазо-імпульсного керування і коефіцієнтом підсилення  ;
;  - двигун незалежного збудженням з коефіцієнтом передачі
- двигун незалежного збудженням з коефіцієнтом передачі  ;
;  - тахогенератор з коефіцієнтом передачі
- тахогенератор з коефіцієнтом передачі  ;
;  - реактор згладжуючий;
- реактор згладжуючий;  - опір обмоток додаткових полюсів двигуна;
- опір обмоток додаткових полюсів двигуна;  - давач струму з коефіцієнтом передачі
- давач струму з коефіцієнтом передачі  і стабілітрони
і стабілітрони  і
і  .
.
Виходячи з заданих діапазону регулювання і статизму  , необхідно розрахувати коефіцієнти передачі всіх ланок, які забезпечують діапазон регулювання швидкості
, необхідно розрахувати коефіцієнти передачі всіх ланок, які забезпечують діапазон регулювання швидкості  зі статизмом
зі статизмом  і обмеження струму в усталеному режимі величиною
і обмеження струму в усталеному режимі величиною 
 .
.
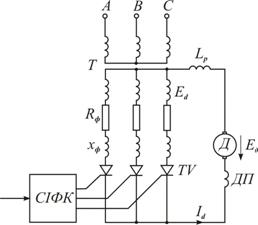
Для живлення двигунів постійного струму потужністю  використовують трифазну нульову схему випрямлення зі згладжуючим ректором (рис.3.2). Потужність трансформатора приймається типовою і рівною
використовують трифазну нульову схему випрямлення зі згладжуючим ректором (рис.3.2). Потужність трансформатора приймається типовою і рівною  .
.
 Основною характерис-тикою керованого випрям-ляча є залежність ЕРС вто-ринної обмотки від кута керування
Основною характерис-тикою керованого випрям-ляча є залежність ЕРС вто-ринної обмотки від кута керування  :
:
 . /3.1/
. /3.1/
Зміну кута керування здійснює система імпульс-но-фазового керування, структурна схема якої на-ведена на рис.3.3. Принцип фазового керування полягає у наступному: на вході ге-
нератора імпульсів  по-
по-
Рис.3.2 рівнюються опорна пилкопо-
дібна напруга генератора змінної напруги  з напругою керування
з напругою керування  вихідного пристрою
вихідного пристрою  , яка пропорційна відхиленню швидкості двигуна від заданого значення. Формування керуючого імпульсу генератором імпульсів відбувається в момент зміни знаку різниці напруг
, яка пропорційна відхиленню швидкості двигуна від заданого значення. Формування керуючого імпульсу генератором імпульсів відбувається в момент зміни знаку різниці напруг  , що здійснює порівняльна ланка
, що здійснює порівняльна ланка  .
.

Рис.3.3
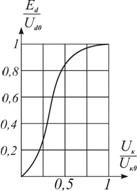
Характеристика  є нелінійною. При розрахунках замість характеристик
є нелінійною. При розрахунках замість характеристик  і користуються характеристикою
і користуються характеристикою  , яка у відносних одиницях наведена на рис.3.4. Зовнішня характеристика ВК
, яка у відносних одиницях наведена на рис.3.4. Зовнішня характеристика ВК
 /3.2/
/3.2/
де  - падіння напруги на відкритому тиристорі, яке не залежить від струму;
- падіння напруги на відкритому тиристорі, яке не залежить від струму;  і
і  відповідно приведені до вторинної обмотки індуктивний і активний
відповідно приведені до вторинної обмотки індуктивний і активний
опори обмоток фази трансформатора.
Напруга на якорі двигуна

 ,/3.3/
,/3.3/
|
 . Активний опір зглад-
. Активний опір зглад-
жуючого реактора  .
.
Індуктивний опір  ,
,
де  - напруга короткого замикання трансформатора;
- напруга короткого замикання трансформатора;  - фазна напруга мережі;
- фазна напруга мережі; 
 ;
;  - коефіцієнт трансформації трансформа
- коефіцієнт трансформації трансформа
тора;  - фазна напруга вторинної обмотки трансформатора для живлення двигуна випрямленого напругою .
- фазна напруга вторинної обмотки трансформатора для живлення двигуна випрямленого напругою .
Активний опір  ,
,
де  - потужність короткого замикання трансформатора.
- потужність короткого замикання трансформатора.
Активний опір згладжую чого реактора
 ,
,
де  .
.
Еквівалентний опір
 .
.
Усталений режим в системі автоматизованого електропривода (рис.3.1) для  описується наступними рівняннями:
описується наступними рівняннями:
 ;
;
 ;
;
 ; /3.4/
; /3.4/
 ;
;
 ;
;
 ,
,
де  і
і  - коефіцієнти підсилення підсилювача і керованого випрямляча;
- коефіцієнти підсилення підсилювача і керованого випрямляча;  - коефіцієнт зворотного зв’язку за швидкістю двигуна;
- коефіцієнт зворотного зв’язку за швидкістю двигуна;  - коефіцієнт передачі
- коефіцієнт передачі
двигуна і  .
.
Систему рівнянь /3.4/ необхідно розв’язати відносно  , щоб отримати рівняння електромеханічної характеристики. Для цього включимо проміжні зміни у такій послідовності:
, щоб отримати рівняння електромеханічної характеристики. Для цього включимо проміжні зміни у такій послідовності:

 або
або 
 або
або 
 . /3.5/
. /3.5/
В рівнянні /3.5/ коефіцієнти  , і
, і  невідомі, але вони повинні бути таким, щоби забезпечити статизм і діапазон регулювання . Діапазон регулювання
невідомі, але вони повинні бути таким, щоби забезпечити статизм і діапазон регулювання . Діапазон регулювання  , де
, де  . Статизм системи автоматич-ного регулювання
. Статизм системи автоматич-ного регулювання  .З цього рівняння визначаємо
.З цього рівняння визначаємо 
 - падіння швидкості у замк-неній системі регулювання при номінальному струмі .
- падіння швидкості у замк-неній системі регулювання при номінальному струмі .
Падіння швидкості в розімкненій системі при номінальному навантаженні
 . /3.6/
. /3.6/
З рівнянь /3.5/ і /3.6/ знаходимо
 , /3.7/
, /3.7/
або  ,
,
де  ;
;  - коефіцієнт підсилення розімкненої системи.
- коефіцієнт підсилення розімкненої системи.
Прийнявши задаючу напруги, яка буде відповідати швидкості  ,
,  , і підставивши це значення в /3.5/ при
, і підставивши це значення в /3.5/ при
 , одержимо
, одержимо  .
.
Звідки коефіцієнт зворотного зв’язку за швидкістю
 .
.
Коефіцієнт передачі керованого перетворювача визначають із умови роботи привода на мінімальний швидкості. За цієї умови
 .
.
Згідно характеристики рис.3.4 
 і
і  відповідає
відповідає  і
і  або
або  . Усереднене значення коефіцієнта підсилення ВК
. Усереднене значення коефіцієнта підсилення ВК
 .
.
Для забезпечення статизму коефіцієнт підсилення підсилювача має дорівнювати
 .
.
Для реалізації зворотного зв’язку за швидкістю вибираємо тахогенератор за умов  і
і  . Цим умовам відповідає тахогенератор ЕТ4/110 з постійними магнітами і такими даними: швидкість обертання
. Цим умовам відповідає тахогенератор ЕТ4/110 з постійними магнітами і такими даними: швидкість обертання  , що відповідає
, що відповідає  ; напруга ; номінальний струм
; напруга ; номінальний струм  ; крутизна наростання
; крутизна наростання  або
або  .
.
Оскільки  і
і  , то вибраний тахогенератор задовольняє нашим умовам.
, то вибраний тахогенератор задовольняє нашим умовам.
Оскільки  , о необхідно вибрати подільник з опором
, о необхідно вибрати подільник з опором
Вибираємо подільник з опором  . Тоді опір
. Тоді опір  , а
, а  .
.
Щоби струм в колі зворотного зв’язку не спричиняв не лінійність, більшу за  , опір зовнішнього кола повинен бути більшим опору подільника в 25 разів. Приймаємо
, опір зовнішнього кола повинен бути більшим опору подільника в 25 разів. Приймаємо  . При даному
. При даному  в колі зворотного зв’язку буде протікати струм
в колі зворотного зв’язку буде протікати струм  .
.
Потужність резистора 
 . Потужність резистора
. Потужність резистора  дорівнює
дорівнює  . За каталогом вибираємо резистори і .
. За каталогом вибираємо резистори і .
Побудова граничних електромеханічних характеристик. Підставивши в /3.5/ значення коефіцієнтів, одержимо

 .
.
При 
 .
.
Рівняння нижньої граничної характеристики одержимо, підставивши в /3.5/  :
:

При частота обертання  .
.
За цими даними на рис.3.5 побудовані граничні електромеханічні характеристики.
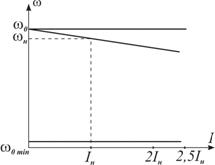
Рис.3.5








