 2018-01-08
2018-01-08 620
620МЕТОДИЧНІ ВКАЗІВКИ
до виконання лабораторних робіт з дисциплін "Засоби автоматики та телемеханіки", "Автоматизація виробничих процесів та робототехніка" "Основи автоматизації виробничих процесів в транспортному будівництві"
Київ НТУ 2011
Методичні вказівки до виконання лабораторних робіт з дисциплін: «Засоби автоматики та телемеханіки», «Автоматизація виробничих процесів та робототехніка», «Основи автоматизації виробничих процесів в транспортному будівництві», / Укл.: Й.Д. Осипчук, О.П. Пальчик, К.:НТУ, 2008.- 59 с.
Укладачі: Йосип Данилович Осипчук, канд. техн. наук, доцент
Олег Петрович Пальчик, асистент
Відповідальний за випуск Й.Д. Осипчук
Лабораторна робота № 1
ДОСЛІДЖЕННЯ ПРОСТОГО ІНДУКТИВНОГО ПЕРВИННОГО ПЕРЕТВОРЮВАЧА ПЕРЕМІЩЕННЯ
Мета роботи - ознайомитись з конструкцією та принципом роботи простих індуктивного вимірювального перетворювача переміщення.
Основні теоретичні відомості
Індуктивні первинні вимірювальні перетворювачі переміщення (ІПП) використовуються на автотранспорті, авторемонтних підприємствах, при автоматизації в будівництві як перетворювачі з широким діапазоном вимірюваного переміщення.
Первинний ІПП для вимірювання великих переміщень (до 100 мм) зображений та рис. 1.1.
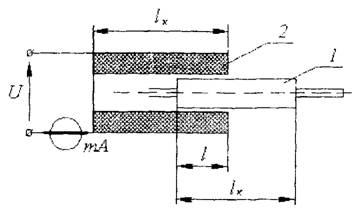
Рис. 1.1
При переміщенні якора l всередині котушки соленоїди 2 змінюється величина входження якоря у соленоїд l, що призводить до зміни індуктивності котушки
 (1.1)
(1.1)
де w - кількість витків котушки; lk - довжина котушки; q - поперечний перетин котушки; l - величина переміщення якора; m - магнітна проникність матеріалу якора.
Повний опір обмотки котушки соленоїда

і крізь обмотку котушки буде текти струм, який визначається виразом
де U прикладена напруга живлення; Rnp Rk - активні опори приладу та обмотки котушки: w - кругова частота напруги живлення.
Характер зміни повного опору Z та струму ІПП зображений на рис. 1.2.
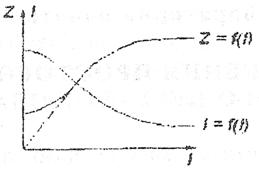
Рис. 1.2.
Очевидно, що І = ¦(L), отже, струм залежить від переміщення якора l.
При малих значеннях l внаслідок значного розсіювання магнітного потоку вплив величини l на значення L, та I значно послаблений, що призводить до зменшення чутливості ІПП. Струм у котушці соленоїда визначається з формули:

і буде максимальним.
При більших значеннях l розсіювання магнітного потоку стає незначним і струм у котушці соленоїда визначаємо з виразу (1.2).
Як видно з виразу (1.2), значення струму залежить від напруги живлення та його частоти, що вносить додаткову похибку в результат виміру величини переміщення l.
Індуктивні ІПП простої будови, не мають ковзаючих контактів, мають відносно велику віддаваєму електричну потужність і можуть працювати на змінному струмі промислової частоти.
Недоліком простих ІПП є залежність результатів від напруги і частоти кола живлення, нелінійність характеристики та порівняно низька чутливість.








