 2018-01-21
2018-01-21 725
7251. Необхідно реалізувати систему керування, яка б керувала рухом ланки промислового робота, відслідковуючи вихід еталонної моделі:
 , (5.1)
, (5.1)
де  – вихід еталонної моделі; r – задає сигнал на вході моделі.
– вихід еталонної моделі; r – задає сигнал на вході моделі.
Структурна схема, що пояснює принцип побудови системи керування з еталонною моделлю, показана на рисунку 5.1.
Рисунок 5.1 – Структурна схема
2. Побудуйте відповідну динамічну модель, реалізувавши її в Simulink.
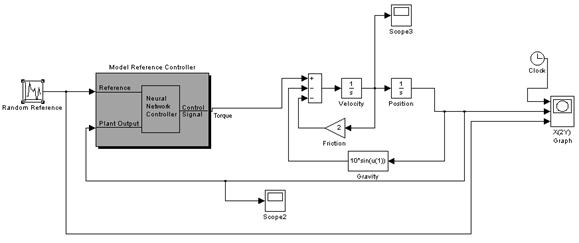
Рисунок 5.2 – Модель системи
3. Активуйте блок нейромережевого регулятора, двічі клацнувши на блок Model Reference Controller. Відкриється вікно графічного інтерфейсу
контролера:
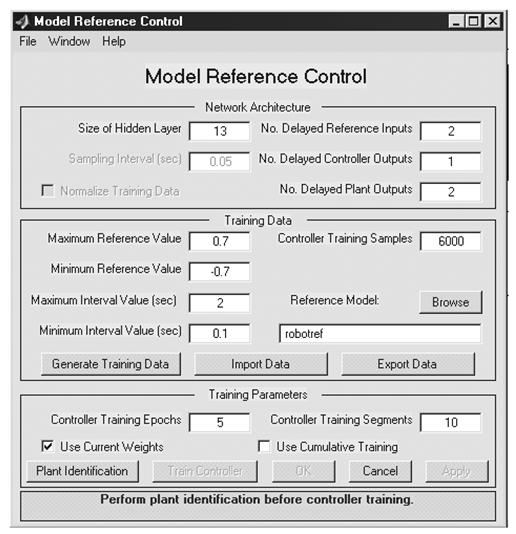
Рисунок 5.3 – Вікно блока нейромережевого регулятора
4. Перед тим як встановити параметри контролера, необхідно побудувати модель керованого процесу. Тобто необхідно виконати ідентифікацію керованого процесу – побудувати нейромережеву модель. Для цього відкрийте вікно спеціальної процедури Plant Identification, що зображене на рис. 5.4.
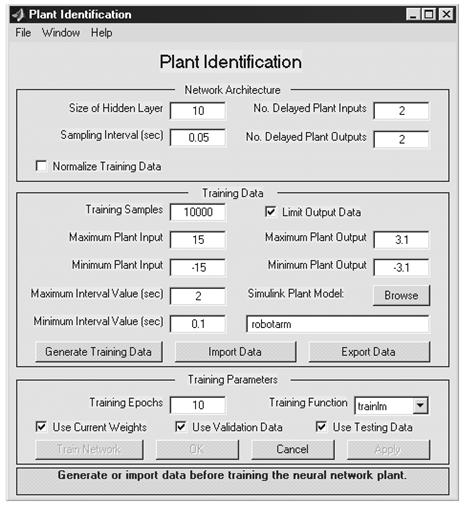
Рисунок 5.4 – Вид вікна Plant Identification
Це вікно може бути використане для побудови нейромережевих моделей для будь-якого динамічного об’єкта, що описаний моделлю Simulink.
5. Для системи керування необхідна динамічна модель, реалізована в Simulink, що відповідає рівнянню руху ланки, має вигляд, зображений на рис. 5.5. Реалізуйте наведену схему та збережіть її в робочому каталозі з ім’ям “ robotarm ”.
Рисунок 5.5 – Схема динамічної моделі ланки
6. Процедура ідентифікації потребує встановлення наступних параметрів:
- Size of Hidden Layer – розмір прихованого шару визначається кількістю використовуваних нейронів;
- Sampling Interval – такт дискретності в секундах визначає інтервал між двома послідовними моментами знімання даних;
- No. Delayed Plant Inputs – кількість елементів запізнення на вході моделі;
- No. Delayed Plant Outputs кількість елементів запізнення на виході моделі;
- Normalize Trainig Data – вікно контролю нормування навчальних даних до діапазону [0 1];
- Trainig Samples – довжина навчальної вибірки (кількість точок знімання інформації);
- Maximum Plant Input – максимальне значення вхідного сигналу;
- Minimum Plant Input – мінімальне значення вхідного сигналу;
- Maximum Interval Value – максимальний інтервал ідентифікації в
секундах;
- Minimum Interval Value – мінімальний інтервал ідентифікації в секундах;
- Limit Output Data – вікно контролю, що дозволяє обмежити обсяг вихідних даних; тільки при включеному вікні контролю будуть доступні два наступних вікна редагування тексту;
- Maximum Plant Output – максимальне значення вихідного сигналу;
- Minimum Plant Output – мінімальне значення вихідного сигналу;
- Simulink Plant Model – завдання моделі Simulink із зазначенням вхідних і вихідних портів, що використовуються для побудови нейромережевої моделі керованого процесу;
- Generate Trainig Data – кнопка запуску процесу генерації навчальної послідовності;
- Import Data – імпорт навчальної послідовності з робочої області або файла даних;
- Export Data – експорт згенерованих даних у робочу область або файл;
- Trainig Epochs – кількість циклів навчання;
- Trainig Function – завдання навчальної функції;
- Use Current Weights – вікно контролю, що дозволяє підтвердити використання поточних ваг нейронної мережі;
- Use Validation/Testing For Training – вибір цих вікон контролю буде означати, що 25 відсотків даних з навчальної послідовності буде використано для формування тестової і контрольної підмножин відповідно.
7. Установивши параметри, як зазначено на рис. 5.4, натисніть кнопку Generate Trainig Data, буде запущена програма генерації навчальної послідовності. Програма генерує навчальні дані шляхом впливу випадкових східчастих впливів на модель Simulink керованого процесу. Графіки вхідного і вихідного сигналів об’єкта мають бути такими, як зображено на рис. 5.6.

Рисунок 5.6 – Графіки вхідного і вихідного сигналів об’єкта
8. По завершенні генерації навчальної послідовності необхідно прийняти згенеровані дані (Accept Data) або відмовитися від них (Reject Data).
9. При поверненні до зміненого вікна Plant Identification починайте навчання нейронної мережі, натиснувши кнопку Train Network.
10. По завершенні навчання нейромережевої моделі на графіках відобразяться результати, а саме результати навчання та тестування на контрольній підмножині (Training data, Testing data). Для того щоб згенерувати або імпортувати нові дані, продовжити навчання або зберегти отримані результати, натисніть кнопку Ok або Apply. У результаті параметри нейромережевої моделі керованого процесу будуть занесені до блока Model Reference Controller.
11. Для навчання контролера в полі Reference Model необхідно вказати ім’я схеми, що описує еталонну модель. Для цього слід рівняння еталонної моделі (5.1) методом зниження похідної реалізувати в Simulink моделі та зберегти її в робочому каталозі з ім’ям “ robotref ”.
12. Самостійно згенеруйте параметри контролера на навчіть мережу.
13. Навчіть регулятор на основі нейронної мережі. Установіть кількість циклів навчання за вказівками викладача. Проведіть 5000 вимірів навчальної послідовності та виведіть результати на екран.
14. Порівняйте роботу моделі з різними параметрами, отримавши графіки їх роботи.
Зміст звіту
1. Указати номер, тему й мету лабораторної роботи.
2. Навести відповідні вікна з параметрами моделі керованого процесу та контролера.
3. Відобразити отримані графіки вхідних і вихідних сигналів об’єкта.
4. Зробити порівняльні висновки стосовно роботи нейромережевого контролера при різних параметрах.
Контрольні питання
1. Які архітектури нейронних мереж реалізовані в пакеті Neural Network Toolbox? Охарактеризуйте кожну з них.
2. Як побудувати нейромережеву модель?
3. Що таке ідентифікація керованого процесу?
4. Які обов’язкові параметри вказують при створенні нейромережевої
моделі?
5. Як навчається мережа?
Література: [2, 6–9, 11–12].








