 2017-11-01
2017-11-01 895
895 Различные механические колебания широко распространены в окружающем мире, в технике и быту. Простейшей моделью колебательной системы является математический маятник – подвешенное на тонкой нерастяжимой нити или на тонком стержне длиной
Различные механические колебания широко распространены в окружающем мире, в технике и быту. Простейшей моделью колебательной системы является математический маятник – подвешенное на тонкой нерастяжимой нити или на тонком стержне длиной  тело размером гораздо меньшим и потому принимаемое за материальную точку. Массы нити или стержня считаются пренебрежимо малыми по сравнению с массой тела
тело размером гораздо меньшим и потому принимаемое за материальную точку. Массы нити или стержня считаются пренебрежимо малыми по сравнению с массой тела  .
.
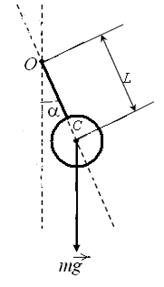
Физическим маятником называют твердое тело, которое может вращаться вокруг неподвижной горизонтальной оси О - оси вращения (качания) маятника, не проходящей через центр тяжести тела (рис. 8.1).
Законом движения физического маятника является уравнение динамики вращательного движения твердого тела вокруг оси вращения
 , (8.1)
, (8.1)
где I – момент инерции маятника относительно оси вращения,  – угол отклонения маятника, вектора угла
– угол отклонения маятника, вектора угла  , бесконечно малого поворота
, бесконечно малого поворота  , угловой скорости
, угловой скорости  и углового ускорения
и углового ускорения  направлены вдоль оси вращения
направлены вдоль оси вращения  ,
,  ,
,  ,
,  - проекции этих векторов на ось ,
- проекции этих векторов на ось ,  - время,
- время,  – вращающий момент,
– вращающий момент,  - проекция момента на ось ,
- проекция момента на ось ,  – сила тяжести, приложенная к центру масс С и вызывающая повороты маятника, L – расстояние между осью вращения и центром масс маятника С.
– сила тяжести, приложенная к центру масс С и вызывающая повороты маятника, L – расстояние между осью вращения и центром масс маятника С.
Момент инерции I материальной точки массой , находящейся на расстоянии  от оси равен
от оси равен
 , (8.2)
, (8.2)
Согласно закону аддитивности моментов инерции, момент инерции сложной системы тел равен сумме моментов инерции частей, составляющих данную систему. Поэтому момент инерции I твердого тела с плотностью  относительно некоторой оси определяется выражением
относительно некоторой оси определяется выражением
 , (8.3)
, (8.3)
где – расстояние элемента массы  от оси вращения. Для нахождения момента инерции тел относительно произвольной оси используется теорема Гюйгенса[1] – Штейнера. Согласно этой теореме момент инерции
от оси вращения. Для нахождения момента инерции тел относительно произвольной оси используется теорема Гюйгенса[1] – Штейнера. Согласно этой теореме момент инерции  тела относительно оси, проходящей через центр масс, и момент инерции
тела относительно оси, проходящей через центр масс, и момент инерции  относительно второй оси, параллельной первой, и удаленной от нее на расстоянии
относительно второй оси, параллельной первой, и удаленной от нее на расстоянии  , связаны соотношением
, связаны соотношением
 . (8.4)
. (8.4)
При выборе на рис. 8.1 положительного направления отсчета углов поворота против часовой стрелки вектор направлен из плоскости чертежа вдоль оси вращения: вертикально вверх (к нам) при  и вертикально вниз (от нас) при
и вертикально вниз (от нас) при  . На рис. 8.1 показано отклонение маятника с , при котором вектор вращающего момента направлен из плоскости чертежа вертикально вниз (от нас). При он будет направлен противоположно. Поэтому вектора и всегда направлены противоположно друг другу. Выберем направление оси из плоскости чертежа вдоль оси вращения вертикально вверх (к нам) и обозначим
. На рис. 8.1 показано отклонение маятника с , при котором вектор вращающего момента направлен из плоскости чертежа вертикально вниз (от нас). При он будет направлен противоположно. Поэтому вектора и всегда направлены противоположно друг другу. Выберем направление оси из плоскости чертежа вдоль оси вращения вертикально вверх (к нам) и обозначим  , при этом
, при этом  . Запишем уравнение (8.1) в проекции на ось
. Запишем уравнение (8.1) в проекции на ось
 . (8.5)
. (8.5)
При малых отклонениях маятника из положения равновесия  и
и  . Вращающий момент
. Вращающий момент  , стремящийся вернуть маятник в положение равновесия, пропорционален углу отклонения (с противоположным знаком) и в этом отношении аналогичен упругой силе. Тогда уравнение (8.5) примет вид
, стремящийся вернуть маятник в положение равновесия, пропорционален углу отклонения (с противоположным знаком) и в этом отношении аналогичен упругой силе. Тогда уравнение (8.5) примет вид
 ,
,  , (8.6)
, (8.6)
а его решение является уравнением гармонических колебаний
 , (8.7)
, (8.7)
с амплитудой  , циклической частотой
, циклической частотой 
 (8.8)
(8.8)
и периодом
 . (8.9)
. (8.9)
Математический маятник, подвешенный на тонком стержне (нити), является частным случаем физического маятника с  и моментом инерции
и моментом инерции  . В этом случае формулы (8.8), (8.9) переходят в формулы
. В этом случае формулы (8.8), (8.9) переходят в формулы
 , (8.10)
, (8.10)
 . (8.11)
. (8.11)
Формула (8.11) позволяет определять ускорение свободного падения  по измерениям периода колебаний маятника
по измерениям периода колебаний маятника  :
:
 . (8.12)
. (8.12)
Формула (8.9) позволяет определять момент инерции или его отношение к массе  по измерениям периода колебаний маятника :
по измерениям периода колебаний маятника :
 . (8.13)
. (8.13)
Кинетическая энергия физического маятника в ходе его колебаний меняется по закону
 , (8.14)
, (8.14)
где  – угловая скорость. За нулевое значение потенциальной энергии маятника
– угловая скорость. За нулевое значение потенциальной энергии маятника  примем его потенциальную энергию при нулевом отклонении
примем его потенциальную энергию при нулевом отклонении  . Высота
. Высота  подъема центра масс тела с учетом приближенной формулы
подъема центра масс тела с учетом приближенной формулы  при
при  равна
равна
 . (8.15)
. (8.15)
Потенциальная энергия маятника равна
 . (8.16)
. (8.16)
В предыдущих рассуждений предполагалось отсутствие трения, в таком случае в ходе колебаний по закону (8.7) полная механическая энергия физического маятника сохраняется
 . (8.17)
. (8.17)
Физические маятники №1 и №2, применяемые в настоящей работе, представляет собой сплошные однородные шары на нити длиной  . Пренебрегая массой нити, можно считать, что центр масс маятника находится в центре шара. Расстояние L от центра тяжести до точки подвеса равно
. Пренебрегая массой нити, можно считать, что центр масс маятника находится в центре шара. Расстояние L от центра тяжести до точки подвеса равно  . Для однородного шара радиуса
. Для однородного шара радиуса  и массы момент инерции относительно оси, проходящей через его центр масс, равен
и массы момент инерции относительно оси, проходящей через его центр масс, равен
 . (8.18)
. (8.18)
Момент инерции шара относительно оси, проходящей через точку подвеса, можно вычислить по теореме Гюйгенса-Штейнера:
 . (8.19)
. (8.19)
Физический маятник №3, применяемый в настоящей работе, представляет собой тонкостенную сферу радиуса (шарик для настольного тенниса) на нити длиной  . Пренебрегая массой нити, можно считать, что центр масс маятника находится в центре шара. Расстояние L от центра тяжести до точки подвеса равно
. Пренебрегая массой нити, можно считать, что центр масс маятника находится в центре шара. Расстояние L от центра тяжести до точки подвеса равно  . Для тонкого кольца радиуса и массы момент инерции относительно оси, совпадающей с его диаметром равен
. Для тонкого кольца радиуса и массы момент инерции относительно оси, совпадающей с его диаметром равен
 . (8.20)
. (8.20)
Тонкостенную сферу радиуса и массы можно представить состоящей из множества колец и ее момент инерции относительно оси, проходящей через центр масс, равен
 . (8.21)
. (8.21)
Момент инерции сферы относительно оси, проходящей через точку подвеса, можно вычислить по теореме Гюйгенса-Штейнера:
 . (8.22)
. (8.22)
В приближении  моменты инерции (8.19) и (8.22) равны
моменты инерции (8.19) и (8.22) равны  и данные физические маятники можно считать математическими.
и данные физические маятники можно считать математическими.








