 2014-01-27
2014-01-27 945
945Лекция № 7
Классификация транкинговых систем
Для классификации транкинговых систем связи используют следующие признаки.
Метод передачи речевой информации
По этому признаку транкинговые системы подразделяются на аналоговые и цифровые. Аналоговыми являются подавляющее большинство известных на сегодняшний день транкинговых систем. В таких системах передача речи в радиоканале осуществляется с использованием частотной модуляции, а шаг сетки частот обычно составляет 12,5 или 25 кГц.
В настоящее время выпускаются и цифровые транкинговые системы: EDACS фирмы Ericsson и системы, соответствующие стандартам TETRA и APCO 25. В них для передачи речи используются различные типы вокодеров, преобразующих аналоговый речевой сигнал в цифровой поток со скоростью не более 4,8 Кбит/с.
Число зон
В зависимости от числа базовых станций и общей архитектуры сети связи различаются однозоновые и многозоновые системы. Первые располагают только одной базовой станцией, а вторые — несколькими базовыми станциями с возможностью роуминга.
Тип многостанционного доступа
В подавляющем большинстве транкинговых систем используется многостанционный доступ с частотным разделением (МДЧР). Единственное известное исключение — системы, соответствующие стандарту TETRA, в которых реализован многостанционный доступ с временным разделением (МДВР). В этих системах на одной несущей частоте организуются четыре рабочих канала. Таким образом, стандарт TETRA предусматривает тип доступа МДЧР/МДВР *.
Способ поиска и назначения канала
По способу поиска и назначения канала различают системы с децентрализованным и централизованным управлением.
В системах первого вида поиск свободного канала выполняют абонентские радиостанции, а ретрансляторы базовой станции обычно не связаны друг с другом и работают независимо. Особенность систем с децентрализованным управлением — относительно большое время установления соединения между абонентами, растущее по мере увеличения числа ретрансляторов. Такая зависимость связана с тем, что абонентские радиостанции вынуждены непрерывно и последовательно сканировать рабочие каналы в поисках сигнала вызова, который может поступить от любого ретранслятора, или свободного канала, если вызов посылает сам абонент. Наиболее характерные представители систем такого типа — системы, соответствующие стандарту SmarTrunk.
В системах с централизованным управлением поиск и назначение свободного канала производятся на базовой станции. В таких системах организуются каналы двух типов: рабочие (traffic channel) и управления (control channel). Все запросы о предоставлении связи направляются по каналу управления, по нему же базовая станция извещает абонентские устройства о назначении канала, отклонении запроса или о постановке его в очередь.
Тип канала управления
Во всех транкинговых системах используются цифровые каналы управления. Различают системы с выделенным частотным и распределенным каналами управления.
В системах первого типа данные в канале управления передаются со скоростью до 9,6 Кбит/с, а для разрешения конфликтов используются протоколы типа ALOHA. Выделенный канал управления имеют транкинговые системы StartSite, SmartNet и SmartZone фирмы Motorola, система EDACS фирмы Ericsson и некоторые другие.
В системах второго типа информация о состоянии системы и поступающих вызовах распределена между низкоскоростными субканалами передачи данных, совмещенными со всеми рабочими каналами. Таким образом, в каждом частотном канале системы передаются не только речь, но и данные канала управления. В аналоговых системах для организации канала управления обычно используется субтональный диапазон частот 0—300 Гц. Наиболее характерные представители транкинговых систем этого класса — системы, соответствующие стандарту LTR, и система MultiNet фирмы E.F.Johnson.
Способ удержания канала
Транкинговые системы могут удерживать канал связи на протяжении всего разговора или только на время передачи радиосигнала.
Первый способ, называемый транкингом сообщений (message trunking), наиболее традиционен для этих систем связи. Он обязательно применяется во всех случаях использования дуплексной связи или соединения с ТФОП.
Второй способ может быть реализован только при использовании полудуплексных радиостанций, в которых передатчик включается на время произнесения абонентом фраз разговора. В паузах, между концом фразы одного абонента и началом ответной фразы другого, передатчики обеих абонентских радиостанций выключены. Значительная часть транкинговых систем эффективно использует такие паузы, немедленно освобождая канал после окончания работы передатчика абонентской радиостанции. Реплики одного и того же разговора могут передаваться по разным каналам системы. Такой метод обслуживания, предусматривающий удержание канала связи только на время передачи радиосигнала, называется транкингом по передаче (transmission trunking). Платой за высокую эффективность данного метода является снижение комфортности переговоров: в состоянии высокой нагрузки канал предоставляется с некоторой задержкой, что приводит к фрагментарности и раздробленности разговора.
Мобильными системами связи называют такие сети, которые обладают различными комбинациями мобильности:
Терминальная мобильность - возможность МС получать услуги связи при движении и способность сети идентифицировать, определять местоположение и сопровождать терминал.
Персональная мобильность - возможность пользователя получать услуги связи (прием и посылку вызова) с любой МС на базе персонального идентификатора и способность сети обеспечить эти услуги, в соответствии с потребностями пользователя. Персональная мобильность подразумевает способность сети определять МС пользователя с целью операции, сопровождения и выполнения вызова.
В настоящее время в России получили применение следующие мобильные системы:
транкинговые системы
сотовые системы
системы персонального радиовызова (пейджеры)
системы бесшнуровой телефонии
глобальные спутниковые системы
Однако развитие мобильности затрудняется по ряду причин:
острый дефицит спектра частот
низкий уровень телефонизации в России
низкая плотность населения и неравномерность распределения
низкая платежеспособность населения
Исторически впервые в эксплуатации появились транкинговые системы, так как в условиях ограничений на использование радиосвязи возможность ее применения для связи с подвижными абонентами предоставлялась государственным, ведомственным или крупным частным организациям (полиция, пожарная охрана, такси и т. п.). Для вызова подвижного абонента (внутри ограниченной зоны обслуживания) стали использоваться пейджинговые системы. Появившиеся совсем недавно сотовые системы являются принципиально новым видом систем связи, так как они построены в соответствии с сотовым принципом распределения частот по территории обслуживания (территориально-частотное планирование) и предназначены для обеспечения радиосвязью большого числа подвижных абонентов с выходом на телефонную сеть общего пользования. Если транкинговые системы создавались (и создаются) в интересах узкого круга абонентов, то сотовые системы стали использоваться в интересах широких кругов населения.
Системы спутниковой навигации ГЛОНАСС и GPS
Эра радио открыла новые возможности перед человеком. С появлением радиолокационных станций, когда стало возможным измерять параметры движения и относительное местоположение объекта по отражённому от его поверхности лучу радиолокатора, встал вопрос о возможности измерения параметров движения объекта по излучаемому сигналу.
В 1957 году в СССР группа учёных под руководством В.А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. Но, что самое главное, была установлена возможность решения обратной задачи - нахождения координат приёмника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны.
При движении по орбите спутник излучает сигнал определённой частоты, номинал которой известен на приёмной стороне (потребитель). Положение ИСЗ в каждый момент времени известно, точнее, его можно вычислить на основании информации, заложенной в сигнале спутника. Пользователь, измеряя частоту пришедшего к нему сигнала, сравнивает её с эталонной и таким образом вычисляет доплеровский сдвиг частоты, обусловленный движением спутника. Измерения производятся непрерывно, что позволяет составить своего рода функцию изменения частоты Доплера. В определённый момент времени частота становится равной нулю, а затем меняет знак. В момент равенства нулю частоты Доплера потребитель находится на линии, которая является нормалью к вектору движения спутника. Используя зависимость крутизны кривой доплеровской частоты от расстояния между потребителем и ИСЗ и измерив момент времени, когда частота Доплера равна нулю, можно вычислить координаты потребителя.
Таким образом, искусственный спутник Земли становится радионавигационной опорной станцией, координаты которой изменяются во времени вследствие движения спутника по орбите, но заранее могут быть вычислены для любого момента времени благодаря эфемеридной информации, заложенной в навигационном сигнале спутника.
Сетевая радионавигационная спутниковая система (СРНСС) Глонасс
Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях. Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами):
космический сегмент, в который входит орбитальная группировка искусственных спутников Земли (иными словами, навигационных космических аппаратов);
сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
аппаратура пользователей системы.
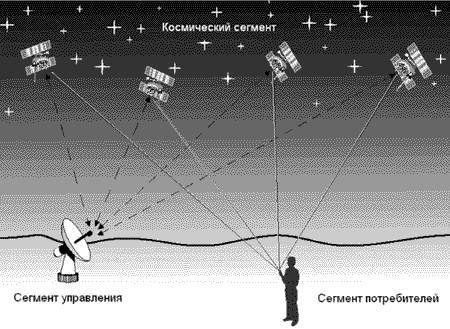
Рисунок 39 Сегменты высокоорбитальных навигационных систем
Глонасс и GPS
Из этих трёх частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции - навигационных определений, - система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку. Кроме того, с её помощью можно производить определение ориентации объекта на основе измерений, производимых от четырёх приёмников сигналов навигационных спутников.
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте " 19100 км. Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут. Время эксплуатации спутника - 5 лет, за это время параметры его орбиты не должны отличаться от номинальных значений больше чем на 5%. Сам спутник представляет собой герметический контейнер диаметром 1,35 м и длиной 7,84 м, внутри которого размещается различного рода аппаратура. Питание всех систем производится от солнечных батарей. Общая масса спутника - 1415 кг. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.
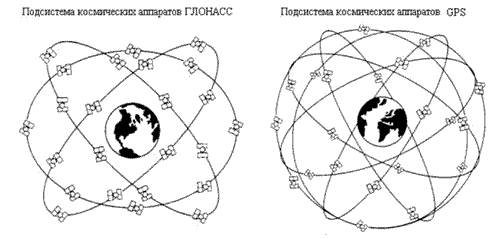
Рисунок 40 Космический сегмент систем ГЛОНАСС и GPS
Сегмент наземного комплекса управления системы ГЛОНАСС выполняет следующие функции:
эфемеридное и частотно-временное обеспечение;
мониторинг радионавигационного поля;
радиотелеметрический мониторинг НКА;
командное и программное радиоуправление НКА.








