 2014-01-31
2014-01-31 1124
1124Структурная схема прямого преобразования
Отличительная черта СИ, имеющего структурную схему прямого преобразования (рис. 11.22), состоит в том, что все преобразования Измерительного сигнала производятся в прямом направлении. Схема состоит из n последовательно соединенных блоков.

Рис. 11.22. Структурная схема прямого преобразования
На схеме через К1, К.,,..., Кn обозначены коэффициенты преобразования блоков. Каждый i-й коэффициент определяется по формуле К = dUi/dUi-1, где
Ui-1 и Ui — входной и выходной сигналы i-го блока.
Входной сигнал Uвх, несущий информацию об измеряемой величине, последовательно преобразуется в промежуточные сигналы U1, U2,..., Un-1 и в выходной сигнал Uвыx. В общем случае каждый из них является переменным во времени и может быть представлен в виде суммы гармонических составляющих. В связи с этим коэффициент Кi должен выражаться комплексным числом, а анализ структурных схем проводиться с использованием теории функций комплексного переменного. Однако для простоты рассмотрения будем считать, что информативным параметром сигнала является только его амплитуда (это чаще всего и бывает на практике). Тогда коэффициенты преобразования выразятся вещественными числами. Предположим также, что коэффициенты преобразования не зависят от уровня сигнала, т.е. звенья считаются линейными: К( = const.
Первоначально считая, что все помехи AUoi (см. рис. 11.22) равны нулю, получим уравнение преобразования СИ, имеющего структурную схему прямого преобразования:
 , (11.10)
, (11.10)
где К — коэффициент преобразования СИ.
На процесс измерения будут оказывать влияние изменения и нестабильность коэффициентов преобразования DКi, а также дрейфы нуля, помехи и наводки, которые в сумме можно описать сигналами DU0i, складываемыми с выходными сигналами каждого блока. Абсолютная погрешность DUвых измерения выходной величины, обусловленная нестабильностью коэффициента преобразования, может быть рассчитана как погрешность косвенного измерения с учетом выражения (11.10):

Как видно из этого уравнения, погрешность DUвых является мультипликативной, т.е. зависит от уровня измеряемого сигнала. Относительная мультипликативная погрешность складывается из относительных погрешностей структурных элементов:
где dш = DКi/Кi — относительная нестабильность коэффициента преобразования i-го блока; DК/К - относительная нестабильность коэффициента преобразования СИ.
Рассмотрим погрешность, обусловленную дрейфом нуля и наводками. Дрейф нуля — это изменение сигнала на выходе блока, не связанное с изменением входного сигнала. Он, как правило, определяется при входном сигнале, равном нулю. Дрейф нуля приводит к смещению передаточной функции 1-го элемента (рис. 11.23,а). Результирующее действие сигналов DU0i приводит к появлению дополнительного выходного сигнала

Эта погрешность приведена к выходу СВ и по своей сути является аддитивной.
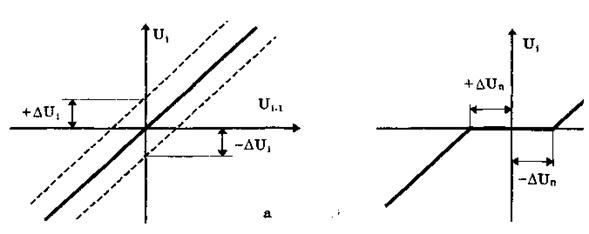
Рис. 11.23. Функции преобразования блоков с дрейфом нуля (а)
и порогом чувствительности (б)
Таким образом, как следует из двух последних уравнений, в СИ, имеющем структурную схему прямого преобразования, происходит суммирование погрешностей, вносимых отдельными блоками. Для достижения высокой точности прибора требуется высокая стабильность параметров и характеристик каждого из блоков. Все это затрудняет реализацию высокоточных СИ по схеме прямого преобразования.
Особенность уравновешивающего или, как еще говорят, компенсационного преобразования состоит в том, что выходная величина средства измерений Uвых (рис. 11.24) подвергается обратному преобразованию в величину U'm, однородную с входной величиной DU. Следовательно, используется отрицательная обратная связь.
Средства измерений, имеющие такую структуру, могут работать в двух режимах: неполного уравновешивания, когда сигнал рассогласования DU = Uвх - U'm ¹ О, и полного уравновешивания, когда ди = О. Рассмотрим сначала первый режим.
Цепь прямого преобразования
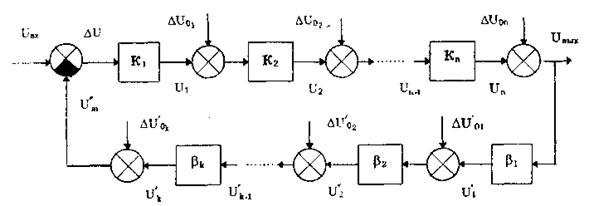
Цепь обратного преобразования
Рис. 11.24. Схема уравновешивающего преобразования
Для вывода уравнения преобразования Uвых = j(Uвх) будем считать справедливыми те упрощающие предположения, которые были приняты при анализе схемы прямого преобразования. При отсутствии помех сигнал рассогласования DU поступает на вход измерительной цепи прямого преобразования. Ее выходной сигнал
где Ki — коэффициент преобразования i-го структурного элемента цепи прямого преобразования, является входным для цепи обратного преобразования. Ее выходное напряжение
где bi — коэффициент преобразования i-го структурного элемента цепи обратного преобразования.
Коэффициент преобразования СИ с учетом двух последних уравнений имеет вид

а уравнение преобразования соответственно
 (11.11)
(11.11)
Следовательно, выходной сигнал зависит от коэффициентов преобразования цепей прямого и обратного преобразования. При |ЗК»1 выходное напряжение Uвых » Uвых/b, цепь прямого преобразования практически не влияет на работу прибора, поэтому нестабильность коэффициентов преобразования Кi не вызывает погрешности измерения.
Относительная мультипликативная погрешность, обусловленная нестабильностью коэффициентов преобразования К и b, находится из уравнения (11.11):
где DК, Db — суммарные погрешности, обусловленные нестабильностью коэффициентов К и b. При bК >> 1 погрешность dUвых(K) от нестабильности коэффициентов преобразования прямой цепи уменьшается в (1 + bК) раз. Погрешность dUвых(b), обусловленная нестабильностью коэффициентов преобразования цепи обратной связи, при этих условиях почти полностью входит в суммарную погрешность. Следовательно, в прямой цепи можно использовать активные нестабильные преобразователи, например усилители, но при этом необходимо выполнять условие bК >> 1. Коэффициент обратного преобразования b, наоборот, должен иметь высокую стабильность во времени.
Аддитивная погрешность, обусловленная дрейфом нуля, наводками, порогом чувствительности звеньев и другими аналогичными причинами, моделируется путем введения в структурную схему (рис. 11,24) дополнительных сигналов AU01, AU02, …, AU0n, DU'01, DU'02,..., DU'0k. Абсолютная аддитивная погрешность, приведенная к входу СИ,
В режиме полного уравновешивания рассогласование DU=U—U'm = 0. Это возможно, если в цепи прямого преобразования имеется интегрирующий элемент с функцией преобразования вида
например электродвигатель, интегратор, выполненный на операционном усилителе.
Уравнение преобразования СИ для этого случая имеет вид Uвых = Uвx/b. Коэффициент преобразования полностью определяется параметрами цепи обратной связи и не зависит от параметров цепи прямого преобразования.
Мультипликативная относительная погрешность, связанная с нестабильностью коэффициентов преобразования блоков bi,
зависит только от свойств цепи обратной связи.
Аддитивная погрешность схем с полным уравновешиванием почти целиком обуславливается порогом чувствительности звеньев DUn — минимальным сигналом на входе, способным вызвать сигнал на выходе (см. рис. 11.23, б). При входном сигнале меньше DUn сигнал на выходе не появляется. Следовательно, уравновешивание схемы наступает при U—U'm= ± DUn. При этом играет роль порог чувствительности звеньев в цепи прямого преобразования до интегрирующего звена включительно.
Приведенная к входу абсолютная аддитивная погрешность

где DU0i - порог чувствительности интегрирующего звена. Для уменьшения погрешности, обусловленной порогом чувствительности звеньев, следует увеличивать коэффициенты преобразования звеньев прямой цепи. В приведенных формулах фигурирует суммарная погрешность — сумма случайной и систематической составляющих.
Схемы СИ зачастую могут быть комбинированными, т.е. содержать цепь прямого преобразования, звенья которой охвачены отрицательной обратной связью. Следует отметить, что принцип построения структурной схемы влияет на многие параметры СИ, такие как входные и выходные сопротивления, динамические и другие характеристики.

