 2014-02-09
2014-02-09 1601
1601Структурная схема устройства компенсационного преобразования показана на рис. 7.
Для цепи обратного преобразования (обратной связи)
x m=x nb 1 b 2… b m= x nb, (10)
где b — коэффициент преобразования цели обратного преобразования; b1,b2,…bm — коэффициенты преобразования звеньев цепи обратной связи.'
 |
На входе цепи прямого преобразования происходит сравнение (компенсация) входной измеряемой величины х и выходной величины цепи обратного преобразования х m, которая должна быть однородной с величиной х и иметь при установившемся режиме противоположный знак.
При подаче на вход сигнала х выходной сигнал х n, а следовательно, и xm будут возрастать до тех пор, пока сигналы x и х m не станут равны. При этом по величине х n можно судить об измеряемой величине х.
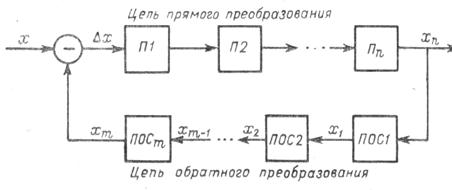 |
Рис.7. Структурная схема средства измерения компенсационного преобразования
Устройства, имеющие такую структурную схему, могут работать как с полной компенсацией (устройства с астатической характеристикой), так и с неполной компенсацией (устройства со статической характеристикой).
При полной компенсации в установившемся режиме
Dх = х — x m = 0. (11)
Это возможно в тех устройствах, у которых в цепи прямого преобразования предусмотрено интегрирующее звено с функцией преобразования
 |
Примером такого звена является электродвигатель, для которого угол поворота вала определяется интегралом по времени от приложенного напряжения.
В этом случае, учитывая (10) и (11), получим
Таким образом, в момент компенсации сигнал на выходе устройства пропорционален входному сигналу и не зависит от коэффициентов преобразования цени прямого преобразования.
Чувствительность (коэффициент преобразования)
(13)
Мультипликативная относительная погрешность измерения, обусловленная нестабильностью коэффициентов преобразования звеньев, при достаточно малых изменениях этих коэффициентов
(14)
| Рис.8.Функция преобразования с порогом чувствительности |
Как видно из (14), относительная мультипликативная погрешность обусловлена только относительным изменением коэффициента преобразования цепи обратного преобразования, причем увеличение коэффициента р вызывает отрицательную мультипликативную погрешность.
Аддитивная погрешность в средствах измерения с полной компенсацией практически обусловливается порогом чувствительности звеньев, расположенных до интегрирующего звена,, и порогом чувствительности самого интегрирующего звена.
Под порогом чувствительности звена понимается то наименьшее изменение входного сигнала, которое способно вызвать появление сигнала на выходе звена. Заметный порог чувствительности имеют, например, электродвигатели, часто применяемые в рассматриваемых устройствах.
Для реальных звеньев график функции преобразования может иметь вид, показанный на рис. 8, где — — порог чувствительности.
Порог чувствительности устройства с полной компенсацией зависит от порогов чувствительности звеньев, расположенных в цепи прямого преобразования до интегрирующего звена, и самого интегрирующего звена следующим образом:
(15)
где D и — порог чувствительности интегрирующего звена.
При наличии звеньев с порогом чувствительности состояние компенсации наступает при х — хт = ± Дя. Таким образом, изменение входного сигнала в пределах ± &х не вызывает изменения выходного сигнала, т. е. появляется абсолютная аддитивная погрешность, равная ±Dд.
 Из (15) очевидно, что для уменьшения аддитивной погрешности, обусловленной порогом чувствительности звеньев, следует увеличивать коэффициенты преобразования Аг1, /с2,..., kn. Предел увеличения этих коэффициентов обусловлен динамической устойчивостью устройства (см. далее).
Из (15) очевидно, что для уменьшения аддитивной погрешности, обусловленной порогом чувствительности звеньев, следует увеличивать коэффициенты преобразования Аг1, /с2,..., kn. Предел увеличения этих коэффициентов обусловлен динамической устойчивостью устройства (см. далее).
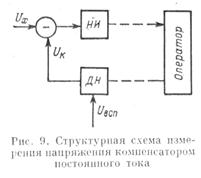
Измерительные устройства с ручным уравновешиванием можно рассматривать как имеющие структурную схему компенсационного преобразования с полной компенсацией. Например, для компенсатора постоянного тока с ручным урав-новешиванием может быть дана структурная схема, показанная на рис. 9, где ДН - делитель напряжения, на котором получается известное падение напряжения U K для компенсации (уравновешивания) неизвестного напряжения U x. Разница U x — U K = D U преобразуется нуль-индикатором НИ в отклонение указателя, которое наблюдается оператором. При отклонении указателя НИ оператор с помощью делителя напряжения изменяет UK до состояния компенсации (U к = U х) и по известному значению U K определяется значение U x. Оператор с делителем напряжения в этом случае выполняет функции интегрирующего звена. Как следует из вышесказанного, нестабильность чувствительности нуль-индикатора в некоторых пределах не вызывает появления погрешности, однако порог чувствительности нуль-индикатора приведет к погрешности.
При неполной компенсации в средствах измерений интегрирующего звена нет и обычно выполняется условие (10), а также
х n = k D х, (16)
где k = k 1, k 2,..., k n — коэффициент преобразования цепи прямого преобразования.
В этом случае установившийся режим наступает при некоторой разности:
D х = x — х m. (17)
Разность D х необходима для поддержания сигнала на требуемом уровне.
 Зависимость между выходным сигналом и входным, находимая путем решения уравнений (10), (16) и (17),
Зависимость между выходным сигналом и входным, находимая путем решения уравнений (10), (16) и (17),
(18)
Как видно из (18), при установившемся режиме выходной сигнал пропорционален входному и зависит от коэффициентов преобразования как цепи обратного, так и прямого преобразования.
Если выполняется условие kb >>1, то уравнение (18) переходит в (12) и при этом нестабильность коэффициента преобразования цепи прямого преобразования не влияет на работу устройства. Практически чем выше kb, тем меньше влияние k. Предел увеличения kb обусловлен динамической устойчивостью устройства (см. далее).
Чувствительность (коэффициент преобразования) устройства с неполной компенсацией
(19)
Отсюда видно, что для получения высокой чувствительности следует снижать b, но для выполнения условия kb >> 1 необходимо увеличивать k.
Мультипликативная погрешность, обусловленная, изменением коэффициентов преобразования звеньев при достаточно малых изменениях этих коэффициентов,
где
Если kb >> 1, то
(21)
Следовательно, при kb > 1 (что обычно имеет место) составляющая, обусловленная изменением коэффициента b, целиком входит в результирующую погрешность, а составляющая, обусловленная изменением коэффициента k, входит в результирующую погрешность ослабленной в k b раз.
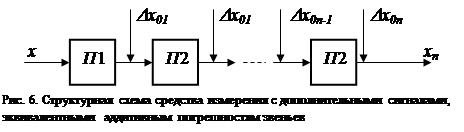
Аддитивная погрешность может быть проанализирована путем введения в структурную схему дополнительных сигналов ___, ____,...,___________ ____, равных смещениям функций преобразования соответствующих звеньев.
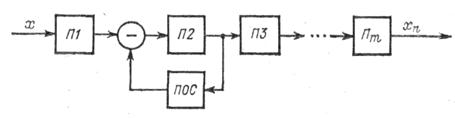 |
Рис. 10. Комбинированная структурная схема средства измерения
Применяя методику, рассмотренную ранее, получим абсолютную аддитивную погрешность
(22)
Пример средств измерений, имеющих рассматриваемую структурную схему, приведен в § 33. Следует отметить, что средства измерения могут иметь комбинированные структурные схемы, как, например, показано на рис. 10. Структурная схема измерительного устройства влияет не только на рассмотренные характеристики (чувствительность, погрешность), но также влияет на другие характеристики: входные и выходные сопротивления, динамические свойства и др.
Средства измерения в динамическом режиме. При исследовании динамического режима средства измерения его структурная схема разбивается на звенья, как было указано в начале параграфа. Теоретическое исследование динамического режима обычно преследует две цели: исследование переходного процесса, характеристикой которого является время установления выходного сигнала, и определение динамической погрешности. В настоящем параграфе рассматриваются некоторые вопросы переходного процесса в средстве измерения 1 в предположении, что все звенья являются линейными, т. е. переходный процесс в звеньях описывается линейными дифференциальными уравнениями с постоянными коэффициентами. Кроме того, уравнения каждого звена — первого или второго порядка.
чения хс, получим, например, систему дифференциальных уравнений:
(23)
В этих уравнениях а1,а2, as,..., аn, й^, Аг2» •••» ^п ~~ постоянные коэффициенты (ki — коэффициенты преобразования).
Решая совместно систему уравнений (23) относительно выходного сигнала и его производных, получим
,(24)
где &!, Ъг, *.., Ът — постоянные коэффициенты, зависящие от коэффициентов, входящих в систему уравнений (23) и от значения хс.Решением уравнения (24) или исследованием его при помощи математической модели-для решения уравнений можно определить время установления выходного сигнала и влияние на его величину отдельных звеньев и их параметров. В гл. 3 рассмотрены характеристики
переходного процесса для некоторых приборов. При исследовании средств измерений компенсационного преобразования (замкнутой структуры), например в соответствии со схемой рис. 7, необходимо аналогичным путем составить дифференциальное уравнение для выходного сигнала. Если цепь обратного преобразования обладает также инерционностью, то порядок дифференциального уравнения повышается и значения постоянных коэффициентов изменяются. Это означает, что характер переходного процесса от введения цепи обратного преобразования может существенно измениться. Оказывается, что в некоторых случаях в замкнутых структурах могут возникнуть длительные незатухающие колебания, т. е. средство измерения не будет устойчивым в работе и пользоваться им будет нельзя.Потеря устойчивости определяет границу максимального значения глубины обратной связи (величину /cf5 — см. формулу 19). Устойчивость работы замкнутых структур (критерии устойчивости) рассматриваются в теории автоматического регулирования, полностью приложимой к компенсационным средствам измерения.








