 2014-01-31
2014-01-31 4884
4884Устройство и принцип действия электродинамического ИМ
Принцип действия электродинамического измерительного механизма основан на взаимодействии магнитных полей двух систем проводников с током.
На рис. 4.9 схематически показано устройство электродинамического измерительного механизма, который состоит из подвижной 1 и неподвижной 2 катушек (рамок), стрелки 3, жестко прикрепленной к подвижной катушке, и шкалы 4, вдоль которой перемещается указатель стрелки.
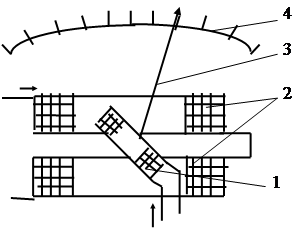
Риc. 4.10. Устройство электродинамического измерительного механизма
Применяют круглые или прямоугольные катушки. Обычно неподвижная катушка состоит из двух одинаковых частей, разделенных воздушным зазором. Вращающий момент создается при взаимодействии магнитного поля, создаваемого током I1, проходящим по катушке 1, и магнитным полем, создаваемым током, проходящим через катушки возбуждения 2. Электромагнитная энергия We двух контуров с токами
We = L1 I12 /2 + L2 I22 /2 + I1 I2M1,2, (4.11)
где L1, L2 - индуктивность подвижной и неподвижной катушек; M1,2 - взаимная индуктивность катушек 1 и 2.
Так как индуктивность катушек не зависит от угла поворота, поэтому вращающий момент, действующий на подвижную катушку 1
MВР = I1I2 (dM1,2/da). (4.12)
При механическом создании противодействующего момента угол отклонения подвижной может быть определен по формуле:
a = I1I2 (dM1,2/da)/W. (4.13)
При включении электродинамического механизма в цепь переменного тока угол отклонения:
a = I1I2 cosy (dM1,2/da)/W, (4.14)
где I1 и I2 - действующие значения токов; y - угол сдвига фаз между векторами токов I1 и I2.
В электродинамических логометрических измерительных механизмах противодействующий момент создается электрическим способом. Подвижная часть такого механизма состоит из двух жестко закрепленных между собой под определенным углом g катушек. Угол отклонения a зависит от отношения токов I1/I2.
Области применения, достоинства и недостатки
Приборы электродинамической системы могут применяться как в цепях постоянного, так и в цепях переменного тока. Шкала приборов неравномерная. Характер шкалы зависит от формы катушек и их взаимного расположения. Изменяя множитель dM1,2/da, можно улучшить шкалу так, что в начале шкалы будет иметь место неравномерность, а далее шкала будет практически равномерной. Электродинамические ваттметры имеют практически равномерную шкалу, амперметры и вольтметры - равномерную шкалу, начиная с 15-20 % ее номинального значения.
Электродинамические приборы применяют в качестве: ваттметров постоянного тока и однофазных, трехфазных, малокосинусных ваттметров переменного тока, амперметров и вольтметров переменного и постоянного токов. Электродинамические логометрические измерительные механизмы применяются в фазометрах, частотомерах, фарадомерах. Выпускаются комбинированные приборы - ампервольтваттметры.
Электродинамические амперметры выполняются по двум схемам, показанным на рис. 4.11 а и 4.11 б.
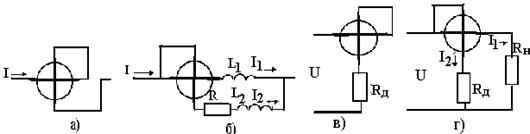
Рис. 4.11. Схемы включения катушек электродинамического механизма
Последовательное соединение катушек (рис. 4.11 а) используется в амперметрах, предназначенных для измерения малых токов (до 0,5 А). Так как y = 0 и I1 = I2 = I, уравнение преобразования амперметра сводится к виду
a = I2(dM1,2/da)/W. (4.15)
В параллельной схеме (рис. 4.11 б), которая используется при больших токах (до 10 А), подбором индуктивностей L1, L2 и резистора R в цепях катушек задаются токи I1 = k1I; I2 = k2I и разность фаз y =0. Уравнение преобразования амперметра будет иметь вид:
a = k1 k2.I2(dM1,2/da)/W. (4.16)
Для выполнения электродинамического вольтметра последовательно с катушками, соединенными по схеме (рис. 4.11 а), включается добавочный резистор RД, как показано на рис. 4.11 в. Уравнение преобразования вольтметра имеет вид:
a= [U2/(R2W)](dM1,2/da), (4.17)
где R = RД + RV - общее сопротивление цепи.
Наиболее важной группой электродинамических приборов являются ваттметры. На рис. 4.11 г представлена простейшая схема однопредельного электродинамического ваттметра.
Учитывая, что I1 = IН и I2 = U/(R2 + RД), уравнение преобразования электродинамического ваттметра постоянного тока может быть записано в виде
a = [1 /W(R2 + RД)] IH U dM1,2/da) = [1 /W(R2 + RД)] P dM1,2/da. (4.18)
На переменном токе уравнение преобразования:
a = [1 /(W(R2 + RД))] IH Ucosj dM1,2/da = [1 /(W(R2 + RД))]. РаdM1,2/da, (4.19)
где j - угол сдвига фаз между приложенным напряжением U и током IH в нагрузке RН; R2 – сопротивление параллельной катушки; Ра - активная мощность нагрузки.
Из выражений (4.18), (4.19) видно, что шкала ваттметров равномерная.
Основными достоинствами электродинамических приборов являются:
- возможность использования в цепях как постоянного, так и переменного токов;
- возможность градуировки на постоянном токе;
- высокая стабильность показаний во времени;
- высокий класс точности (например, выпускаются электродинамические амперметры и миллиамперметры, вольтметры, однофазные ваттметры класса точности 0,05, частотомеры - класса 0,5).
Высокая точность приборов обусловлена отсутствием в них, в отличие от других электромеханических приборов, ферромагнитных элементов.
В качестве недостатков таких приборов можно отметить следующие:
- влияние внешних магнитных полей и механических воздействий;
- большую мощность потребления.
По чувствительности электродинамические приборы уступают магнитоэлектрическим. Однако применение растяжек и светового указателя позволяют уменьшить собственное потребление мощности (имеются миллиамперметры с током полного отклонения 1 мА).
Погрешности электродинамических приборов
Погрешностями электродинамических приборов являются: температурная и частотная погрешности; погрешность из-за влияния внешних магнитных полей и др.
Температурная погрешность gt возникает вследствие изменения сопротивления обмоток рамок (катушек) и изменения упругих свойств растяжек или пружинок при изменении температуры. Для компенсации температурной погрешности применяют специальные схемы, например, последовательно-параллельная схема, подобная схеме, приведенной на рис 4.4, позволяет снизить температурную погрешность многопредельного электродинамического ваттметра до gt £ 0,1 %
Частотная погрешность обусловлена зависимостью полного сопротивления катушек от частоты, изменением фазовых соотношений электродинамического прибора, взаимной индуктивностью катушек. Для уменьшения частотной погрешности в параллельную цепь последовательно с обмоткой рамки может быть включен конденсатор С @ L0 /R1 (L0 и R1 - индуктивность и сопротивление подвижной катушки).
Погрешность от влияния внешних магнитных полей уменьшается с помощью магнитных экранов.








