 2014-01-25
2014-01-25 1133
1133Тема № 15
Управление машиной заключается в контроле за фактическим состоянием объекта управления (двигательной установки, рабочего оборудования или рабочих органов, тормозов и тд.
Системы управления классифицируют по следующим признакам:
по назначению (управление тормозами, муфтами, двигателями, положением рабочего органа, движителями и т.п.); по способу передачи энергии (механические, электрические, гидравлические, пневматические и комбинированные); по степени автоматизации (неавтоматизированные, полуавтоматические и автоматические). Неавтоматизированные системы иначе называют эрготическими. Эрготические системы управления делятся на системы прямого действия и с элементами автоматики. Простейшими системами прямого действия являются рычажно-механические системы управления. На рис13. приведена схема рычажно-механической рулевой системы управления ходовыми колесами мобильной машины. При повороте рулевого колеса 7 вправо или влево приводимый червяком 2 зубчатый сектор 3 с рычагом 5, поворачиваясь относительно шарнира 4, через тягу 6, поворотные цапфы 8 и 9 и тягу 7, поворачивает управляемые колеса 10. Эта схема обладает высокой надежностью, не требует дополнительного источника энергии для передачи воздействия управляемому объекту, позволяет машинисту быстро адаптироваться к процессу управления, но может быть использована только в легких машинах.
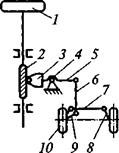
Рис.13.
В рычажно-гидравлической системе управления, например, ленточным тормозом (рис.14.) перемещается поршень гидроцилиндра 5, который выталкивает находящуюся в гидроцилиндре рабочую жидкость по трубопроводу 4 и рабочий гидроцилиндр 3. Через поршень и шток последнего приводится рычаг одно плечо которого связано со сбегающим концом ленты 7 тормоза, вследствие чего лента затягивается на шкиве. Для возврата системы в исходное положение служат пружины 2 и 8. Утечки рабочей жидкости через неплотности в гидроцилиндрах восполняются из бачка 6. Такая система позволяет получить достаточное усилие на тормозной ленте при незначительном усилии на педали.
. 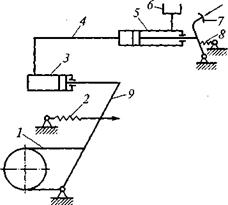
Рис.14. Рычажно-гидравлическая система управления ленточным тормозом
В качестве примера системы управления с гидравлическим усилителем на рис.15. представлена система управления положением отвала бульдозера. Управление сводится к переводу рукоятки гидрораспределителя 5 в одно из положений.
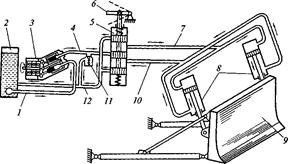
Рис.15. Система управления отвалом бульдозера с гидравлическим
усилителем
В системах управления машинами средней и большой мощности, когда управляющие усилия становятся значительными, применяют специальные пневматические, гидравлические и электрические усилители, питаемые энергией силовой установки машины. На рис16. представлена принципиальная схема системы с пневмоусилителями для поочередного управления ленточным тормозом и муфтой. В этой системе воздух нагнетается компрессором 7 в ресивер 3, откуда он, в зависимости от положения золотника трехходового крана 4, поступает либо в пневмоцилиндр 5, управляющий через рычаг 7 муфтой, либо в пневмокамеру 8, управляющую через рычаг 9 тормозной лентой.
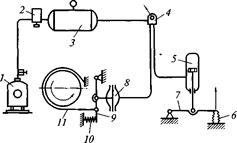
Рис.16. Система управления с пневматическим усилителем

