 2018-02-14
2018-02-14 727
727Типичный пример действия фильтра в режиме наличия сигнала GPS приведен на рисунке 5.3, а в режиме паузы GPS – на рисунке 5.4 (значения входных параметров L=25, prec_vist=prec=0.1). Тестирование при различных значениях L показали, что меньшие значения этого параметра иногда позволяют добиваться несколько лучших результатов (рис. 5.5), однако в целом на основании испытаний рекомендуется значение L=25. Дальнейшее увеличение этого параметра в ряде случаев приводит к искаженным результатам и не рекомендуется.
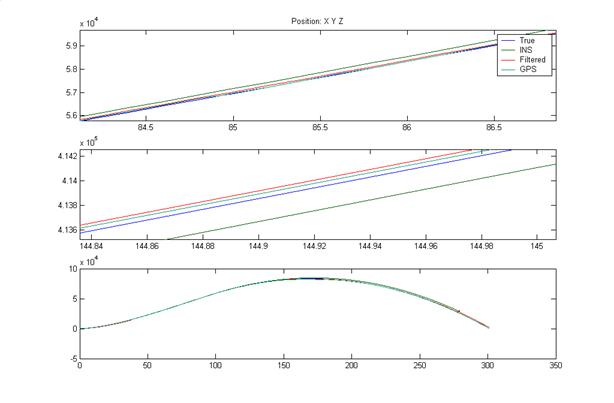
Рис. 5.3. Пример действия фильтра в режиме наличия сигнала GPS

Рис. 5.4.Пример действия фильтра в режиме паузы

Рис. 5.5. Тестирование при различных значениях L
Значение параметра prec_vist определяется свойствами (качеством) используемой ИНС аппаратуры. Естественно, что критическое значение этот параметр приобретает только в случае сильного ухода (дрейфа) сигнала ИНС. Примеры на рисунках 5.6, 5.7, 5.8 показывают, что в таких условиях (третья координата на указанных рисунках) слишком частая перенормировка ИНС (prec_vist=0.1 на рисунке 5.6 и prec_vist=0.15 на рисунке 5.7) может приводить к очень плохим результатам во время паузы GPS. Более редкая перенормировка (prec_vist=0.3 на рисунке 5.8) позволяет поправить ситуацию и «держать» паузу. Приведен также пример редкой (prec_vist=0.9 на рисунке 5.9)
Параметр prec не может быть слишком малым, иначе это приводит к дискредитации работы фильтра, особенно во время пауз (пример на рисунке 5.10). Пример возникновения полюсов (очень большое значение prec_vist) приведен на рисунке 5.11. Рекомендуемые значения – 0.05 ¸ 0.1
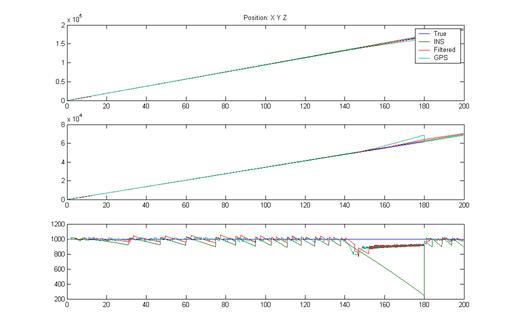
Рис. 5.6. Тестирование при prec_vist=0.1
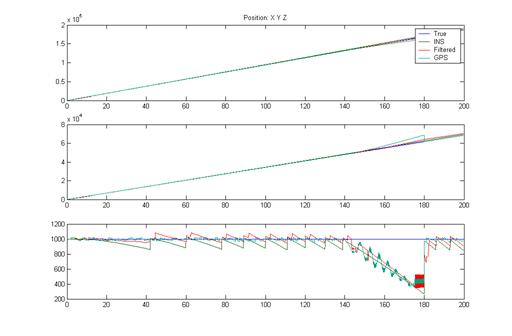
Рис. 5.7.Тестирование при prec_vist=0.15

Рис. 5.8.Тестирование при prec_vist=0.3

Рис. 5.9.Тестирование при prec_vist=0.9

Рис. 5.10. Пример сбоя работы фильтра во время пауз

Рис. 5.11. Пример возникновения полюсов (очень большое значение prec_vist)
Список литературы к теме 5
Использованная литература:
1. Уидроу Б., Стирнэ С.Д. Адаптивная обработка сигналов. – М.: Радио и связь, 1989. – 440 с.
2. Адаптивные фильтры: Пер. с англ./ Под ред. К.Ф.Н. Коуэна и П.М. Гранта. – М.: Мир, 1988. –392 с.
3. Haykin S., Adaptive Filter Theory. – Prentice Hall, 2002. – 936 p.
4. Сергиенко А.Б. Алгоритмы адаптивной фильтрации: особенности реализации в МАТLAB. В журнале «Exponenta Pro», 2003, №1, с. 18–28.
5. Прокис Дж. Цифровая связь. М.: Радио и связь, 2000. – 800 с.
6. Васильев Ф.П. Численные методы решения экстремальных задач. – М.: Наука, 1988. – 552 с.
7. Первозванский А.А. Курс теории автоматического управления. – М.: Наука, 1986. – 616 с.
8. Шкирятов В.В. Радионавигационные системы и устройства. – М.: Радио и связь, 1994. – 160 с.
9. Шамси Баша. Комплексирование ИНС/GPS–ГЛОНАСС с целью коррекции углов ориентации подвижного объекта. Дисс. на соиск. уч. степ. к.т.н. – М.: Моск. гос. техн. ун-т им Н.Э.Баумана, 2000. – 114 с.
10. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. – М.: Машиностроение, 1982. – 215 с.
11. Кузовков Н.Т., Карабанов С.В., Салычев О.С. Непрерывные и дискретные системы управления и методы идентификации. - М.: Машиностроение, 1978. – 221 с.
12. Salychev O.S. Inertial Systems in Navigation and Geophysics. – Moscow: Bauman MSTU Press, 1998. – 352 p.
Рекомендованная литература:
1. Адаптивные фильтры: Пер. с англ./ Под ред. К.Ф.Н. Коуэна и П.М. Гранта. – М.: Мир, 1988. – 392 с.
2. Сергиенко А.Б. Алгоритмы адаптивной фильтрации: особенности реализации в МАТLAB. В журнале «Exponenta Pro», 2003, №1, с. 18–28.








