 2018-02-14
2018-02-14 315
315Найпростішою серед систем керування переміщенням є однокоординатна система. В цьому випадку предмет переміщується вздовж однієї з осей координат і можна використовувати один привідний двигун. Прикладом такої системи є ліфт (рис. 2.1).

Рис. 2.1. Однокоординатний привід переміщення
На цьому рисунку зображена найпростіша система ліфта. Він приводиться в рух електродвигуном, через редуктор обертає барабан. На барабан намотаний трос, на якому висить кабіна. В такому випадку статичний момент має активний характер.
Для піднімання кабіни двигун працює в режимі двигуна, для опускання – в режимі противмикання, динамічного гальмування або, якщо рекуперативного гальмування – за умови, що джерело напруги передбачає таку можливість. Коли ліфт зупинений, треба накладати механічні гальма і відмикати двигун від мережі, тому що це дозволяє зменшити споживання електроенергії.
Таким чином, система керування повинна передбачати режим тяги в одному напрямі обертання, режим гальмування в іншому напрямі, і накладання гальм з відключенням двигуна. Крім того, важливим для приводів подібного призначення є використання давачів положення або принаймні кінцевих вимикачів. Це необхідно для того, щоб обмежити координати пересування кабіни в межах шахти ліфта. Крім того, це дозволяє робити точну зупинку.
Якщо ліфт перевозить людей, накладаються додаткові умови. Керування електроприводом повинне здійснюватись з кабіни ліфта. Прискорення при розгоні і гальмуванні повинне бути обмеженим на певному рівні.
Система керування повинна враховувати всі вищеперераховані вимоги та деякі інші засоби безпеки при керуванні приводом.
У двокоординатному електроприводі переміщення здійснюється вздовж двох взаємно перпендикулярних осей координат. Прикладом двокоординатної системи переміщення є електроталь. В цьому випадку механізм піднімання розміщений на візку, який переміщується вздовж рейки (рис. 2.2).
Так як і в попередньому випадку, система піднімання приводиться в рух одним електричним двигуном. Система переміщення також має один електричний двигун. Механізм піднімання навантажений статичним моментом, що має активний характер, а система переміщення – реактивним моментом. Він викликаний силами тертя в механізмі. Якщо двигун механізму піднімання повинен мати можливість працювати в режимі двигуна і режимі гальмування, то двигун механізму переміщення повинен додатково мати можливість реверсування. Таким чином електропривод переміщення повинен бути чотирьохквадрантним.
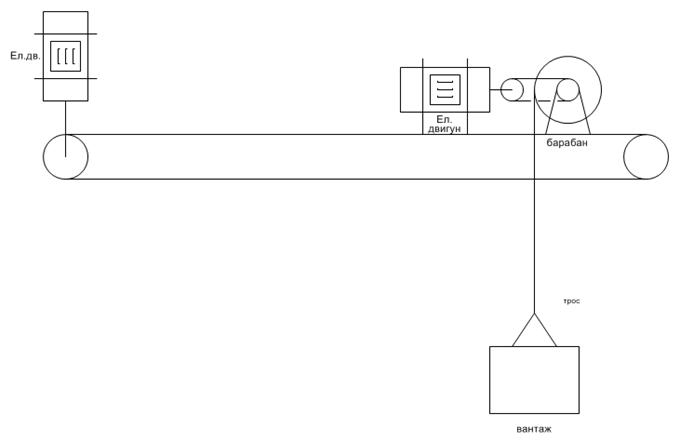
Рис. 2.2. Двокоординатний привід переміщення
Додатково ставиться вимога щодо демпфування коливань, що виникають при роботі механізму. Для того, щоб коливання вантажу затухали при підйомі, опусканні чи переміщенні, потрібна досить м’яка механічна характеристика двигуна. В такому разі невелика зміна швидкості руху не викличе значного стрибка обертового моменту. Таким чином коливання вантажу будуть демпфуватись.
Забезпечення м’якої механічної характеристики двигуна досягається різними способами в залежності від системи керування. Якщо в електроприводі застосована релейно-контакторна система керування, то в колі якоря (для двигуна постійного струму) чи в колі ротора (для асинхронного двигуна) вводяться додаткові опори, які не вимикаються при роботі двигуна. Це пом’якшує механічну характеристику. Якщо двигун живиться від керованого джерела, то можна задати більш м’яку характеристику за допомогою підбору зворотних зв’язків за струмом чи швидкістю та використання відповідних регуляторів. Цей спосіб значно кращий, оскільки зменшує втрати потужності на опорах та покращує ефективність використання електроенергії.
Як для приводу піднімання, так і для приводу переміщення потрібно використовувати механічні гальма, щоб запобігти самовільному переміщенню його частин або вантажу при відімкненні від напруги. Необхідно використовувати два кінцеві вимикачі для приводу переміщення і один (для створення верхньої межі) для приводу піднімання. Потрібно обмежувати прискорення, щоб запобігти проковзуванню або перевантаженню механізмів. Також використовують так званий нульовий захист. Він полягає в тому, що запуск приводу можливий тільки з пульта. В разі непередбачуваного відімкнення приводу від джерела напруги або мережі він зупиниться, а при повторній подачі напруги – не запуститься самостійно, аж доки не буде дано відповідну команду з пульта керування.
Трьохкоординатні системи переміщення часто використовують в кранових механізмах. В цьому випадку електроталь встановлений на мості, який може переміщуватись в напрямку, перпендикулярному до напрямку руху візка (рис.2.3), або ж на стрілі, яка може повертатись на певний кут.
Як і в попередньому випадку, є механізм переміщення візка і механізм піднімання. Але до них додається механізм переміщення моста. В даному випадку (див. рис. 2.3) це козловий кран. Для механізму переміщення моста застосовуються такі сами вимоги, як для механізму переміщення візка, тільки з врахуванням значно більшого навантаження, а саме – можливість тяги, гальмування та реверсування приводу, обмеження прискорення, наявність кінцевих вимикачів та інших засобів захисту. Також ставляться вимоги щодо забезпечення нульового захисту та демпфування коливань приводу при його роботі.

Рис.2.3. Трьохкоординатний привід переміщення
Керування приводом найчастіше здійснюється за допомогою релейно-контакторних систем або за допомогою систем підпорядкованого регулювання і керованого джерела напруги. Промислові контролери працюють з керованими джерелами, використовують зворотні зв’язки, як і системи підпорядкованого регулювання, але їх програмування в вигляді контактного плану подібне до створення релейно-контакторних систем керування.








