 2018-02-14
2018-02-14 263
263
Програму керування складено в вигляді функціонального плану. Всю програму можна умовно розділити на кілька частин. На рис. 3.4 показано алгоритм, за яким при ввімкненні контролера перо повинне вовернутися в початкове положення.

Рис. 3.4. Алгоритм повернення пера в вихідну точку
Коли перо опинилось у початковій точці, слід зчитати координати точок траєкторії. Алгоритм такого зчитування показано на рис. 3.5.

Рис. 3.5. Алгоритм введення координат точок траєкторії
Цикл малювання відрізка, що складається з розрахунку часу переміщення, швидкостей переміщення, проведення лінії та перевірки умови кінця циклу, представлено на рис. 3.6 – 3.7.
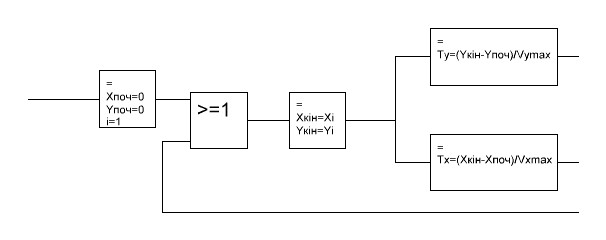
Рис. 3.6. Початок циклу, розрахунок часу переміщення

Рис. 3.7. Цикл малювання відрізка

Рис. 3.8. Кінець циклу
Ці алгоритми, об’єднані в одну кінцеву програму, показано на рис. 3.9.
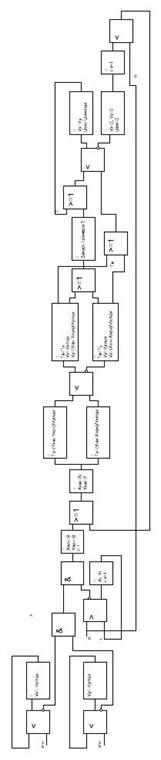
Рис. 3.9. Програма керування, записана в контролер
РОЗДІЛ 4








