 2018-02-14
2018-02-14 402
402Лабораторна установка побудована на базі самописця. Його внутрішні деталі, в тому числі двигуни і механічні приводи, видно на рис. 4.1.
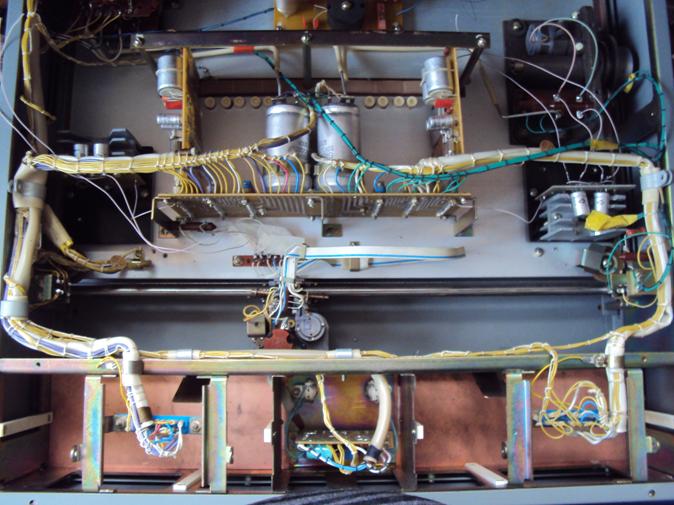
Рис. 4.1. Внутрішній вигляд установки
На цьому зображенні можна два електроприводи постійного струму, схеми керування та інші елементи. Є двигун, що за допомогою барабана і тросу переміщує міст, і двигун, що переміщує перо по мосту. Він також використовує систему з барабаном і тросом. В даному випадку міст і перо не видно. Цю конструкцію в спрощеному вигляді показано на рис. 4.2.
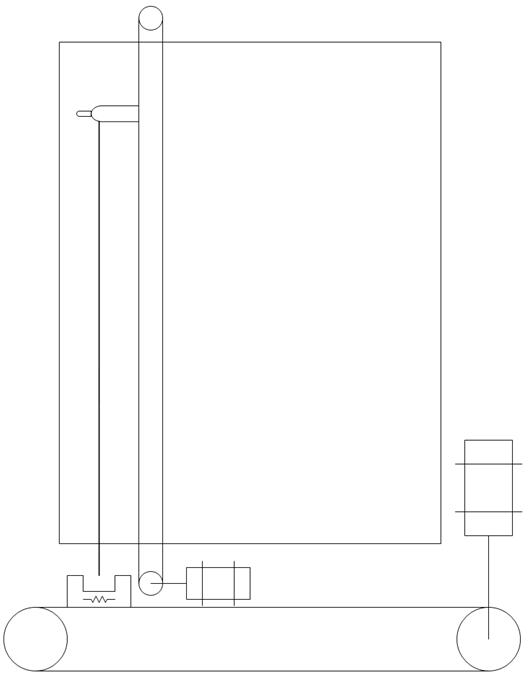
Рис. 4.2. Спрощена кінематична схема установки
Двигуни можуть працювати незалежно один від одного, переміщуючи перо в задану точку. Для проведення лінії перо притискається електромагнітом.
Двигуни беруть напругу від схеми регулювання напруги (див. рис. 2.5). Один з двигунів розміщений на рухомому мості. Це змушує забезпечити спосіб подачі напруги, що допускає такі переміщення. Для цього в різних приводах можуть бути використані контактні рейки чи джгути проводів. В даному випадку використано джгут, який подає напругу на механізми, розміщені на мості (рис. 4.3).

Рис. 4.3. Електродвигун, котушка і давач положення, розміщені на мості
У джгут входить 7 провідників. 2 з них призначені для подачі напруги до 15 В на двигун постійного струму. Ще 2 призначені для того щоб подавати напругу 24 В для живлення котушки електромагніта. Решта 3 провідники під’єднані до потенціометричного давача положення. 2 провідники подають напругу живлення 24 В і 1 знімає сигнал давача.
Схема керування двигунами, що понижує чи змінює полярність напруги (див. рис. 2.5), змонтована на одній платі для кожного з двох двигунів. Для того, щоб транзистор не перегрівався під час роботи, він встановлений на радіаторі. Зовнішній вигляд одного блоку з транзистора, реле і опорів показаний на рис. 4.4 і 4.5.
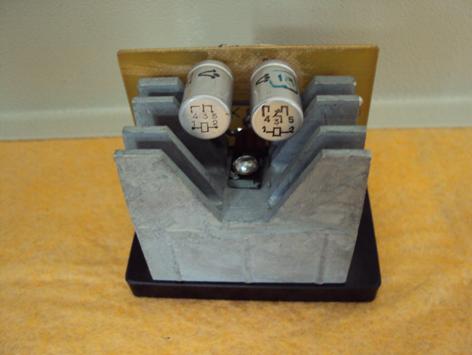
Рис. 4.4. Зовнішній вигляд перетворювача постійної напруги

Рис. 5.5. Перетворювач постійної напруги, вигляд з іншого боку
Виводи цих схем двигунами, вивід живлення електромагніта, входи живлення давачів положення маса, а також виходи з давачів положення повинні бути під’єднані до контролера. Для цього на корпусі установки встановлено роз’єм, до якого вони підключені. Оскільки є лише один вивід на «масу», можна бути впевненим, що еквіпотенціальність мас забезпечено.
За допомогою багатожильного провідника роз’єм установки з’єднаний з аналогічним роз’ємом на стенді. Цей роз’єм, в свою чергу, підключений до промислового контролера. Таким чином, до контролера можна підключити дану чи іншу установку з відповідним роз’ємом.
РОЗДІЛ 5
ЕКОНОМІЧНА ЧАСТИНА
Сьогоднішнє промислове виробництво включає в себе велику кількість електроприводів. Багато з них, наприклад, деякі кранові механізми, можна розглядати як двокоординатні. В минулому всі вони керувались релейно-контактними схемами. Такі схеми керування мають багато недоліків, але альтернативи їм не було.
Електроприводи постійно розвиваються в напрямку покращення експлуатаційних характеристик — надійності, економії електроенергії, захисту працівників та обладнання, та полегшення керування і обслуговування. Важливу роль у цьому відіграє застосування промислових контролерів.
Дана лабораторна установка призначена для того, щоб майбутні спеціалісти здобули навики налаштування двокоординатного електроприводу, керованого промисловим контролером VIPA-200. Контролеру задається тахограма руху, яку повинен відпрацьовувати електропривод. Завданням є програмування самого контролера.
З точки зору економічної ефективності промисловий контролер має ряд переваг порівняно з релейно-контактними схемами:
- промисловий контролер набагато компактніший ніж панель релейно-контакторної системи керування, що дозволяє краще використовувати робоче приміщення
- промисловий контролер самостійно відпрацьовує задану тахограму руху, не вимагаючи постійної роботи оператора; таким чином, якщо на виробництві є одразу кілька однотипних приводів, для нагляду за ними можна призначити лише одного оператора
- промисловий контролер не вимагає технічного обслуговування в процесі роботи без несправностей, в той час як контакти силових реле в процесі роботи зношуються
- промисловий контролер надійніший, оскільки в ньому немає рухомих контактів, що можуть залипати, підгоряти і зношуватись внаслідок неякісного або невиконаного технічного обслуговування
- промисловий контролер дозволяє використовувати вбудовані функції захисту, завдяки цьому зменшується вартість необхідного захисного обладнання
- промисловий контролер працює на низькій напрузі і споживає порівняно малий струм, що зменшує витрати електроенергії.
Промисловий контролер є складним і дорогим пристроєм, який потребує кваліфікованого персоналу, що буде його встановлювати і настроювати. Однак він дозволяє зменшити час простою обладнання, викликаного несправностями в системі керування, а також економить робочу силу. Ці факти свідчать, що в подальшому впровадженні електроприводу варто використовувати керування за допомогою промислового контролера.
До витрат на створення лабораторної установки входять витрати на розробку лабораторної установки і витрати на створення лабораторного стенду.
Таблиця 5.1
Вартість елементів лабораторного стенда
| № | Назва елемента | Вартість, грн. |
| 1 | Промисловий контролер VIPA-200 | 2000 |
| 2 | Стенд лабораторної установки | 100 |
| 3 | Роз’єми і перехідники | 50 |
| 4 | Апарати захисту, комутуюча апаратура | 500 |
| Разом | 2650 |
Таблиця 5.2
Розрахунок оплати праці розробників установки
| № | Посади розробників | Місячний оклад, грн | Годинна ставка, грн | Кількість відпрацьованих днів | Фонд оплати праці, грн |
| 1 | Керівник роботи | 4000 | 25 | 15 | 3000 |
| 2 | Виконавець роботи | 1700 | 10,63 | 43 | 3655 |
| 6655 |
Всього для створення стенду витрачено 9305 грн.
РОЗДІЛ 6
ОХОРОНА ПРАЦІ
Грозові розряди атмосферної електрики небезпечні для життя людей. До того ж блискавка при ударі в будівлю або споруду може завдати великих руйнувань, викликати пожежу.
Блискавовідводи мають різні конструкції: стержньові, антенні та сіточні. Найбільш поширені стержньові.
Блискавковідводи складаються з таких елементів: блискавкоприймача, струмовідводу, заземлювача та мачти.
Одиночний стержньовий блискавковідвод створює навколо споруди, біля якої він встановлений, захисну зону у вигляді подвійного конуса з круглою основою. Радіус його в півтора рази більше висоти блискавкоприймача.
Захисну зону блискавкоприймача можна відобразити графічно. Проведемо горизонтальну лінію та перпендикулярно до неї в масштабі висоту блискавкоприймача, рівну R (рис.5.1).

Рис. 5.1. Схема захисту будівлі від блискавки одиночним стержньовим блискавковідводом
На горизонтальній лінії із точки О в обидва боки в тому ж масштабі відкладемо радіуси основи r, що дорівнюють 1,5 h. Кінці радіусів позначимо літерою Б. На лінії ОН, на відстані 0,8 h від основи, відзначимо точку В, а на лінії радіусів – точки Г, котрі ділять радіуси на дві рівні частини.
За одержаними даними можна побудувати переріз подвійного конуса – зони захисту. Для цього проведемо прямі лінії з точки Н до точки Г, а з точки В до точки Б. Після такої побудови одержимо трикутник, при обертанні якого навколо осі ОН утвориться зона захисту з блискавковідводом висотою h.
Горизонтальний переріз зони захисту на висоті споруди h x зображує коло радіусом r x, яке називається радіусом захисту.
При одиночному стержньовому блискавковідводі висотою менш 60 м радіус захисту визначають за такими співвідношеннями:
а) при 

б) при 
 .
.
Зона захисту одиночного стержньового блискавковідводу висотою більше 60 м, але не вище 100 м, за формою аналогічна зоні захисту одиночного стержньового блискавковідводу висотою менше 60 м, за основу конуса приймається коло радіусом 90 м.
Радіус захисту r x при висоті споруди h x, що захищаеться, для цього випадку визначається такими виразами:
а) при 
б) при 
 .
.
При застосуванні одиночного стержневого блискавковідводу переріз блискавкоприймача повинен бути не менше 100 мм2. За струмоприймач можна використовувати стальний дріт діаметром 6 мм.
Визначення висоту одиночного стержньового блискавковідвода для окремо стоячої лабораторії шириною 5 м та довжиною 8 м. Висота зони захисту  м.
м.
Розв’язок.
Визначимо радіус зони r x за формулою
 ,
,
де а та b – ширина та довжина складу відповідно.
У даному випадку
 м.
м.
Підставимо значення  та
та  у формулу
у формулу

 м.
м.
Опір заземлення розтіканню струму при стержньовому блискавковідводі повинен бути не більше 10 Ом.
Конструкція контуру заземлення може бути різною. Але частіше всього вона виконується із трубчастих або виготовлених з кутиків стержнів, які вбиваються в ґрунт до незамерзаючого шару.
Верхні кінці стержнів з’єднуються між собою металічною штабою за допомогою круглого залізного прута або електрозварюванням. До контуру також електрозварюванням приєднують товстий залізний провід (перетином не менше 50 мм2), який з’єднується зі струмопроводом.
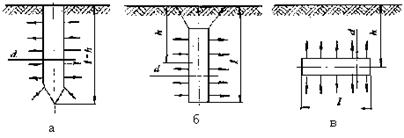
Рис. 5.2. Типи одиночних заземлювачів:
а) – верхній кінець стержня на рівні землі; б) – верхній кінець стержня заглиблений; в) – горизонтальний смуговий заземлювач
Надійність захисного заземлення залежить від величини його опору.
Опором заземлення називають опір, який віддає земля поширенню електричного струму із заземлювача в ґрунтовий шар.
Опір розповсюдженню одиночних трубчастих або стержньових заземлювачів, верхній кінець якого знаходиться на рівні поверхні землі (див. рис. 5.2, а), визначається за формулою:
 .
.
При заглибленні труби (стержня) нижче рівня поверхні (див. рис. 5.2, б) розрахунок ведеться за формулою:
 .
.
Відповідно до продольного смугового заземлювача (див. рис. 5.2, в) опір можна знайти за допомогою формули
 .
.
У наведених формулах прийняті такі позначення:
 – питомий опір ґрунту, Ом·см
– питомий опір ґрунту, Ом·см
 –довжина заземлюючої труби або стержня, см;
–довжина заземлюючої труби або стержня, см;
d – діаметр труби або стержня, см;
b – ширина штаби, см;
h – відстань від поверхні землі до середини заземлювача, см.
Питомий опір ґрунту залежить від стану ґрунту, його структури, наявності солей та його вологості. При розрахунках застосовують середнє значення питомого опору ґрунту, який становить 0,1-5,8 Ом·см. Для розрахунків рекомендується приймати значення, рівне 2 Ом·см.
У відповідності до правил встановлення стержньових блискавковідводів при захисті тваринницьких приміщень щогли та заземлювачі розміщують не ближче 4 м від будови. З метою попередження враження кроковою напругою місце заземлення повинно бути огороджено, щоб тварини не змогли підійти ближче 3 м.
При влаштуванні декількох блискавковідводів заземлювач повинен бути загальним для всіх блискавковідводів.
Оскільки грозовий розряд відбувається миттєво, то через блискавковідвод перебігає імпульс електричного струму. Опір заземлювача поширенню імпульсного струму менший, ніж для струму промислової частоти. Ця різниця враховується імпульсним коефіцієнтом  , який для стержневого блискавковідводу приймається. 0.7.
, який для стержневого блискавковідводу приймається. 0.7.
ВИСНОВОК
В бакалаврській кваліфікаційній роботі досліджено технічні характеристики промислового контролера VIPA-200. Розглянуто способи програмування контролерів VIPA. Розроблено лабораторний макет, що імітує роботу двокоординатного електроприводу переміщення. Створено алгоритм роботи і програму керування контролера. Реалізовано розроблений макет на основі самописця. Розглянуто питання економічних витрат на реалізацію проекту і охорони
праці в лабораторії.
ПЕРЕЛІК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ
1. SIMATIC S7 Програмирование с помощью S7 V5.0 Руководство, 1999. Акционерное общество Siemens.
2. SIMATIC S7 Введение в STEP7 Руководство, 1998. Акционерное общество Siemens.
3. SIMATIC S7 Конфигурирование аппаратуры и проектирование соединений с помощью S7 V5.0 Руководство, 1999. Акционерное общество Siemens
4. www.vipa.com.ua/shell/vipa_cat_200.htm. Программируемые логические контроллеры VIPA System 200V.
5.. Куцик А.С., Місюренко В.О. Автоматизовані системи керування на програмованих логічних контролерах. Навчальний посібник. Львів: Видавництво Львівської політехніки, 2011.








