 2018-02-14
2018-02-14 648
648Завдання № 2. Побудувати статичну характеристику Pвих = f(x) перетворювача сопло-заслінка. Вихідні дані наведені в табл. 4. Варіант завдання вибирається за останньою цифрою шифру.
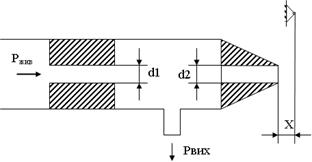
Рис. 3. Схема перетворювача «сопло-заслінка»
Таблиця 4
Вихідні дані до завдання № 2
| Вихідні дані | Номер варіанту | |||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Тиск живлення Ржив, КПа | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 |
| Діаметр дроселя d1, мм | 0,5 | 1.0 | 1,5 | 2,0 | 2,5 | 3,0 | 3,5 | 4,0 | 4,5 | 5,0 |
| Діаметр сопла d2, мм | 1,0 | 1,5 | 2,0 | 2,5 | 3,0 | 3,5 | 4,0 | 4,5 | 5,0 | 5,5 |
| Початкова відстань заслінки від сопла X, мм | 0,02 | 0,04 | 0,08 | 0,12 | 0,16 | 0,2 | 0,4 | 0,6 | 0,8 | 1,0 |
Примітка: вихідний тиск
 , (1)
, (1)
де S1, S2 – площі перерізів постійного і змінного дроселів відповідно, визначаються як
 . (2)
. (2)
Тоді
 . (3)
. (3)
Завдання №3. Побудувати статичну характеристику мембранного виконавчого механізму. Вихідні дані наведені в табл.5. Варіант завдання вибирається за останньою цифрою шифру.
Таблиця 5
Вихідні дані до завдання № 3
| Вихідні дані | Номер варіанту | |||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Діаметр мембрани D, мм | 200 | 150 | 250 | 100 | 300 | 150 | 200 | 100 | 350 | 400 |
| Діаметр жорсткого центра d, мм | 160 | 100 | 200 | 60 | 250 | 80 | 150 | 70 | 270 | 300 |
| Робочий хід приводу Δ l, мм | 50 | 40 | 50 | 30 | 60 | 50 | 40 | 30 | 60 | 80 |
| Жорсткість пружини, кН/мм | 0,04 | 0,045 | 0,05 | 0,054 | 0,06 | 0,07 | 0,075 | 0,06 | 0,075 | 0.08 |
| Початкове стиснення пружини Δ lн, мм | 4 | 3 | 4 | 3 | 6 | 4 | 5 | 4 | 7 | 7 |
Примітка: середнє значення ефективної площі мембрани
 , (4)
, (4)
де D - діаметр мембрани, мм;
d - діаметр жорсткого центру мембрани, мм.
Деформація пружини пов'язана з тиском P співвідношенням
 , (5)
, (5)
де с - жорсткість пружини, кН/мм.
Тиск для подолання початкового стиснення пружини
 , (6)
, (6)
де Δlн - початкове стиснення пружини, мм.
Залежність переміщення Δl від тиску визначається:
 . (7)
. (7)
Статична характеристика мембранного виконавчого механізму ∆ l=f(P).
Завдання №4. Розрахунок динамічних характеристик електродвигунного виконавчого механізму
Вихідними даними для розрахунків є: тип виконавчого механізму; тип двигуна; тип давача положення вала виконавчого механізму, які наведено в табл.6, 7.
Таблиця 6
Вихідні дані до завдання № 4
| Одиниці шифру | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| тип виконавчого механізму | МЕБ- 100/250-250 | МЕО- 250/10-0,25 | МЕБ-40/63-25 | МЕП- 25000/63-250 | МЕО 1600/10-0,25 | МЕО-250/10-0,25 | МЕБ-40/25-10 | МЕБ-100/63-25 | МЕО-630/20-0.25 | МЕП- 63000/63-250 |
| тип приводного двигуна | АИР71В4 | АИР56В4 | АИР56А4 | АИР71А4 | АИР63В4 | АИР56В4 | АИР80А4 | АИР80В4 | АИР56В4 | АИР90L4 |
Таблиця 7
Вихідні дані до завдання № 4
| Десятки шифру | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Тип давача положення валу (штоку) виконавчого механізму | БСПІ-10 | БСПТ-20 | БСПР-10 | БСПТ-10 | БСПІ-10 | БСПТ-20 | БСПР-10 | БСПТ-10 | БСПІ-10 | БСПР-10 |
Приклад. Розрахувати динамічні характеристики електродвигунного виконавчого механізму типу МЕБ - 100/250-250 із приводним двигуном типу АД132М2 з давачем положення вихідного валу виконавчого механізму типу БСПІ-10.
Згідно технічних даних двигун АД132М2 має наступні параметри:
Рном =11,0 кВт - номінальна потужність двигуна;
nо =1500 об/хв. - синхронна швидкість обертання магнітного поля двигуна;
Jд =0,04 кг*м2 - момент інерції двигуна;
sк =19,5 % - критичне ковзання двигуна;
sном =2,8 % - номінальне ковзання двигуна;
mп =  =2,2; mм =
=2,2; mм =  =1,7; mк =
=1,7; mк =  =3,0.
=3,0.
Структурну схему трифазного асинхронного двигуна за каналом Δ w0 → Δ w можна представити у вигляді з’єднання двох частин – електромагнітної і електромеханічної (рис.4), передаточні функції яких наступні:
 - електромагнітна частина трифазного асинхронного двигуна (АД) (лінеаризована);
- електромагнітна частина трифазного асинхронного двигуна (АД) (лінеаризована);
 - механічна частина електричного двигуна.
- механічна частина електричного двигуна.
β - модуль жорсткості лінеаризованої механічної характеристики АД

Рис. 4. Структурна схема асинхронного двигуна
 =
=  ,
,
де  , - критичний момент;
, - критичний момент;
 , - номінальний момент;
, - номінальний момент;
 - номінальна кутова швидкість двигуна;
- номінальна кутова швидкість двигуна;
 - синхронна кутова швидкість двигуна;
- синхронна кутова швидкість двигуна;
sном – номінальне ковзання;
Рном – номінальна потужність двигуна.
Еквівалентна електромагнітна постійна часу кіл статора і ротора асинхронного двигуна Те = (0,006...0,06) с, визначається за формулою
 =
= 
Електромеханічна стала часу визначається наступним чином:

 ,
,
де  - сумарний момент інерції приведений до вала двигуна
- сумарний момент інерції приведений до вала двигуна

 ,
,
 - момент інерції редуктора разом із запірним органом.
- момент інерції редуктора разом із запірним органом.
У відповідності зі структурною схемою АД його результуюча передаточна функція стосовно відхилення Δω0
 .
.
При 
 ,
,
де
 ;
;
 .
.
Згідно розрахунку Тм < 4 Te, звідси
 .
.
Потужність від валу двигуна до регулюючого органу передається через редуктор.
Схема виконавчого механізму представлена на рис. 5.

Рис.5. Принципова схема виконавчого механізму
Коефіцієнт передачі редуктора, як елементу САР, розраховується за формулою
кр=1/iред,
де іред= ωн / ωр - передаточне число редуктора,
ωр - кутова швидкість вихідного валу виконавчого механізму.
 ,
,
 - швидкість обертання вихідного валу виконавчого механізму;
- швидкість обертання вихідного валу виконавчого механізму;
N - кількість повних обертів вихідного валу виконавчого механізму (N = 250 обертів, згідно паспортних даних);
t – час перестановки вихідного валу виконавчого механізму з одного крайнього положення в інше (t = 250 с, згідно паспортних даних).
іред= ωн / ωр = 152,60/6,28 = 24,30.
кр=1/iред = 1/24,30 = 0,041.
Передаточна функція редуктора:
 ,
,
де j2 – кут повороту вихідного валу.
Виконавчий механізм (ВМ) є невід’ємною частиною автоматичної системи регулювання (АСР). Він перетворює енергію керування у механічну енергію переміщення регулюючого органа. При цьому, динамічні властивості АСР в значній мірі залежать від динаміки ВМ. Якщо ВМ має суттєву інерційність, це може викликати появу перерегулювання в роботі АСР. У момент часу, коли сигнал завдання на вході регулятора дорівнює сигналу зворотного зв’язку, регулятор мусить відключатися. Однак ВМ не може раптово зупинитися і продовжує рух. Подолати це явище можна за допомогою паралельно-зустрічного коригувального пристрою, якій здійснює допоміжній зворотний зв’язок за положенням вихідного штока чи вихідного валу ВМ. Такі зв’язки дозволяють зменшити інерційний вибіг ВМ, що покращує роботу системи в цілому [4]. Введення коригувального зворотного зв’язку зменшує ступінь коливальності системи, перерегулювання, а також час регулювання.
Для коригувального зворотного зв’язку (КЗЗ) та контролю за положенням вихідного вала виконавчого механізму можуть використовуватися блоки сигналізації БСПІ, БСПР, БСПТ.
БСПІ - блок сигналізації положення індуктивний призначений для перетворення переміщення вихідного органу виконавчого механізму у зміну індуктивного опору, або блокування в крайніх або проміжних положеннях вихідного органа;
БСПР - блок сигналізації положення реостатний - призначений для перетворення переміщення вихідного органу виконавчого механізму у зміну активного опору, або блокування в крайніх або проміжних положеннях вихідного органа;
БСПТ - блок сигналізації положення струмовий - призначений для перетворення переміщення вихідного органу виконавчого механізму в уніфікований струмовий сигнал 0 - 5 мА, 0 - 20 мА, або 4 - 20 мА, або блокування в крайніх чи проміжних положеннях вихідного органу.
Блоки БСПІ і БСПР працюють в комплекті з блоком підсилювача, який призначений для перетворення сигналів індуктивного чи реостатного давачів положення вала виконавчих механізмів в уніфікований струмовий сигнал 0... 5 (0... 20, 4... 20) мА
Блок сигналізації представляє собою пропорційну ланку вхідним сигналом якої є переміщення вихідного валу виконавчого механізму, а вихідним - струмовий сигнал 0... 5 (0... 20, 4... 20) мА.
Структурна схема ВМ з ланкою коригувального зворотного зв’язку за положенням регулюючого органу наведено на рис.6.
Рис.6. Структурна схема виконавчого механізму з коригувальним зворотнім зв’язком за положенням регулюючого органу
Передаточна функція ланки коригувального зворотного зв’язку:
 ,
,

Передаточна функція виконавчого механізму згідно структурної схеми (рис. 4) має вид:
 .
.
 ;
;
 .
.
Завдання № 5. Представити рішення завдання відповідно до варіанту. Варіант завдання вибирається за останньою цифрою шифру.
Варіант 1. На випробування поставлено 1000 однотипних транзисторів. За 3000 годин відмовило 80 транзисторів. Визначити ймовірність безвідмовної роботи та ймовірність відмови протягом 3000 годин.
Варіант 2. На випробування було поставлено 1000 однотипних елементів. За перші 3000 годин відмовило 80 елементів, а за інтервал часу 3000-4000 годин відмовило ще 50 елементів. Визначити частоту і інтенсивність відмов в проміжку часу 3000-4000 годин.
Варіант 3. Система складається з 12600 елементів, середня інтенсивність відмов яких λср = 0,32 * 10-6 1/год. Визначити ймовірність безвідмовної роботи протягом 50 годин, середню напрацювання до першої відмови.
Варіант 4. Проводилось спостереження за роботою трьох однотипних САУ. За період спостереження було зареєстровано відмов 1САУ - 6, 2САУ - 11, 3САУ - 8. Напрацювання 1САУ - 181 годин, 2САУ - 329 годин, 3САУ - 245 годин. Визначити напрацювання апаратури на відмову.
Варіант 5. Система складається з 2-х пристроїв. Вірогідність безвідмовної роботи кожного з них протягом часу- t = 100 годин відповідно рівні P1 (100) = 0,95, Р2 (100) = 0,97. Інтенсивність - λ не змінюється в часі. Знайти середнє напрацювання до першої відмови системи.
Варіант 6. На випробування поставлено 500 однотипних транзисторів. За 1000 годин відмовило 30 транзисторів. Визначити ймовірність безвідмовної роботи та ймовірність відмови протягом 1000 годин.
Варіант 7. На випробування було поставлено 3000 однотипних елементів. За перші 2000 годин відмовило 50 елементів, а за інтервал часу 2000-2500 годин відмовило ще 20 елементів. Визначити частоту і інтенсивність відмов в проміжку часу 2000-2500 годин.
Варіант 8. Система складається з 8500 елементів, середня інтенсивність відмов яких λср = 0,02 * 10-5 1/год. Визначити ймовірність безвідмовної роботи протягом 100 годин, середнє напрацювання до першої відмови.
Варіант 9. Проводилось спостереження за роботою трьох однотипних САУ. За період спостереження було зареєстровано відмов 1САУ - 8, 2САУ - 5, 3САУ - 12. Напрацювання 1САУ - 232 години, 2САУ - 287 годин, 3САУ - 389 годин. Визначити напрацювання апаратури на відмову.
Варіант 0. Система складається з 2-х пристроїв. Вірогідність безвідмовної роботи кожного з них протягом часу t = 300 годин відповідно рівні P1 (100) = 0,92 і Р2 (100) = 0,9. Інтенсивність - λ не змінюється в часі. Знайти среднє напрацювання до першої відмови системи.
Література:
Основна література
1. Родионов В.Д., Терехов В.А., Яковлев В.Б. Технические средства АСУ ТП: учеб. пособие для вузов по спец. «Автоматизация и управление в технических системах». М.: Высш. шк., 1989. - 263с.
2. Технические средства автоматизации. Программно-техни-ческие комплексы и контроллеры: Учебное пособие. М.: «Издательство Машиностроение-1», 2004. 180 с.
2. Жужалов В.Е., Солдатов В.В., Маклаков В.В., Жиров М.В. Технические средства автоматизации. Учебно-практическое пособие. – М.: МГУТУ, 2004.
3. Жомирук Р.В., Маланчук Є.З. Основи автоматизації гірничого виробництва: Навч. Посібник. – Рівне: НУВГП, 2009. – 373 с.
4. Клюев А.С., Минаев. Наладка систем контроля и автоматического регулирования. – Л.: Стройиздат, 1980. – 280 с.
Допоміжна література
5. А.К. Бабіченко, В.И. Тошинський и др. Промислові засоби автоматизації. Ч.1., Ч.2. Вимірювальні пристрої. Регулювальні і виконавчі пристрої. - Х.: ООО "Роми", 2001. http://bt.kpi.cc
6. Наладка средств автоматизации и автоматических систем регулирования: Справочное пособие / А.С.Клюев, А.Т.Лебедев, С.А.Клюев, А.Г. Товарнов. Под редакцией А.С.Клюева. - М.: Энергоиздат, 1989. - 368 с.
7. Программируемые контроллеры для систем управления. Ч.2. Характеристики микроконтроллеров и ПЛК: Учебное пособие для вузов / Г.И. Загорный, Н.О. Ковзель, В.С. Коновалов, В.И Мойсеенко, А.И. Стасюк. – Харьков: ХФИ «Транспорт Украины», 2003. – 264 с.
8. Фарзане Т.К. и др. Пневматические комплексы технических средств автоматизации. - М.: Машиностроение, 1987. - 280 с.
9. Технические средства автоматизации: учебник для студ. высш. учеб. заведений / Б. В. Шандров, А. Д. Чудаков. — М.: Издательский центр «Академия», 2007. — 368 с.
10. Пьявченко Т.А. Автоматизированные системы управления технологическими процессами и техническими объектами: учебное пособие. Таганрог: ТРТУ.1997. 128с
Додаток 1
Таблиця 1
Технічні дані асинхронних двигунів
| Тип | Р2ном, кВт | nо, об/хв | Jд, кг*м2 | sк, % | sном, % | mп = 
| mм = 
| mк = 
|
| АИР71В4 | 0,75 | 1500 | 0,0015 | 32,1 | 5,67 | 2,0 | 2,5 | 3,2 |
| АИР56В4 | 0,18 | 1500 | 0,00008 | 41,3 | 9,33 | 2,2 | 2,3 | 3,0 |
| АИР56А4 | 0,12 | 1500 | 0,00007 | 43,6 | 10,00 | 2,2 | 2,3 | 2,9 |
| АИР63В4 | 0,37 | 1500 | 0,00008 | 36,2 | 12,00 | 2,2 | 2,3 | 3,1 |
| АИР71А4 | 0,55 | 1500 | 0,0001 | 28,1 | 9,33 | 2,3 | 2,4 | 3,2 |
| АИР80В4 | 1,5 | 1500 | 0,0034 | 22,4 | 5,33 | 2,2 | 2,3 | 3,1 |
| АИР80А4 | 1,1 | 1500 | 0,0028 | 21,7 | 6,00 | 2,2 | 2,3 | 3,1 |
| АИР90L4 | 2,2 | 1500 | 0,0056 | 19,8 | 5,33 | 2,0 | 2,1 | 2,8 |
| АИР100S4 | 3 | 1500 | 0,01 | 19,5 | 6,00 | 2,0 | 2,1 | 2,9 |
| АИР100L4 | 4 | 1500 | 0,013 | 18,1 | 6,00 | 2,1 | 2,2 | 2,9 |








