 2018-02-13
2018-02-13 1289
1289УДК 621.01
Ш 63
Шипилова О.А.
Теория механизмов и машин: Методические указания по выполнению курсовой работы по дисциплине «Техническая механика. Теория механизмов и машин» для бакалавров направления 151000 «Технологические машины и оборудование» очной и заочной форм обучения. – Альметьевск, Альметьевский государственный нефтяной институт, 2013. – 88 с.
В методических указаниях изложены правила оформления графической части курсовой работы и составления расчетно-пояснительной записки. Приведены методика и примеры с численными решениями кинематического анализа и силового расчета рычажного механизма, синтеза эвольвентной зубчатой передачи и анализа кинематики сложных зубчатых передач. Приведено 100 вариантов заданий на курсовую работу.
Печатается по решению учебно-методического совета АГНИ.
Рецензент:
Миндиярова Н.И. – к.т.н., доцент кафедры ПМ АГНИ
Подписано в печать 13.01.2013 г.
Формат 60×84/16
Печать RISO Объем ус.печ.л.
Тираж экз. Заказ № 2
ТИПОГРАФИЯ
АЛЬМЕТЬЕВСКОГО ГОСУДАРСТВЕННОГО
НЕФТЯНОГО ИНСТИТУТА
Татарстан, г. Альметьевск, ул. Ленина, 2
| |
© Альметьевский государственный
нефтяной институт, 2013
СОДЕРЖАНИЕ
| ВВЕДЕНИЕ | 4 |
| Требования к выполнению и оформлению курсовой работы. | 5 |
| Задание на лист 1 | 7 |
| РАЗДЕЛ I. «Кинематический и силовой анализ рычажного механизма» | 7 |
| 1. Кинематический анализ рычажного механизма | 18 |
| 1.1 Определение степени подвижности и класса механизма | 18 |
| 1.2 Построение планов положений механизма | 20 |
| 1.3 Построение плана скоростей механизма | 24 |
| 1.4 Построение плана ускорений механизма | 28 |
| 2. Силовой анализ рычажного механизма | 33 |
| 2.1 Силовой расчет механизма методом планов сил | 33 |
| 2.2 Определение уравновешивающего момента методом Жуковского | 46 |
| РАЗДЕЛ II. «Синтез эвольвентного зацепления и кинематика зубчатых передач» | 50 |
| Задание на лист № 2 | 50 |
| 1. Синтез эвольвентного зацепления | 61 |
| 1.1 Определение геометрических параметров зубчатого зацепления | 61 |
| 1.2 Построение картины зацепления | 63 |
| 1.3 Определение основных параметров эвольвентного зацепления | 65 |
| 1.4 Определение качественных характеристик зацепления | 65 |
| 2. Кинематика многозвенных зубчатых передач | 73 |
| Контрольные вопросы | 81 |
| Литература | 82 |
| Приложение 1 | 83 |
| Приложение 2 | 84 |
| Приложение 3 | 85 |
| Приложение 4 | 86 |
| Приложение 5 | 87 |
Приложение 6 88
| |
ВВЕДЕНИЕ
Задание на курсовую работу предусматривает исследование рычажного и проектирование зубчатого механизма. В процессе выполнении курсовой работы студенты овладевают навыками самостоятельной работы с учебной и справочной литературой; методами проведения расчетов основных параметров механизмов по заданным условиям с использованием графических, аналитических и численных методов исчислений; оформления графической и текстовой конструкторской документации в соответствии с требованиями ЕСКД и ЕСПД; разработкой алгоритмов расчета кинематических и динамических параметров механизмов и машин.
Для облегчения понимая и усвоения методик анализа и синтеза механизмов, используемых при выполнении курсовой работы, в методических указаниях помимо общих рекомендаций по решению задач приведены численные примеры с описанием графических построений.
Требования к выполнению и оформлению курсовой работы.
Курсовая работа по теории механизмов и машин по объему включает 2 листа чертежей формата А1 и расчетно-пояснительную записку.
1 лист – «Кинематический и силовой анализ рычажного механизма» - кинематический анализ и силовой расчет рычажного механизма графоаналитическим методом планов сил и методом Н.Е. Жуковского.
2 лист – «Синтез эвольвентного зацепления и кинематика зубчатых передач» - проектирование эвольвентного зацепления и кинематический анализ графическим методом трехступенчатой зубчатой передачи, планетарного и дифференциального механизмов.
Все графические построения производятся в программе «Компас» (основные – жирными, а вспомогательные – тонкими линиями) и распечатываются на листах формата А1. Допускается выполнение чертежей в карандаше на ватмане формата А1. Схемы механизмов и картину зацепления следует чертить по возможности крупнее, придерживаясь стандартных масштабов по ГОСТу.На всех чертежах должны быть представлены числовые значения и размерности масштабов. Каждый лист в нижнем правом углу должен иметь штамп.
Расчетно-пояснительная записка должна включать содержание и список используемой литературы; все исходные данные (включая схемы механизмов) и данные расчета, необходимые для выполнения работы, как в буквенных обозначениях, так и в числовых значениях. Рисунки и таблицы должны иметь сквозную нумерацию. Все уравнения и формулы следует записывать в общем виде, а затем подставлять в них соответствующие числовые значения в том порядке, в каком стоят буквенные обозначения. Все обозначения должны быть стандартными. Необходимо указывать размерности всех величин. Записка должна выполняться чернилами или распечатываться на одной стороне писчей бумаги формата А4. Титульный лист расчетно-пояснительной записки оформляется по образцу, указанному в приложении 2. Страницы должны быть пронумерованы и иметь стандартные рамки (поля слева 20 мм, сверху, справа и снизу – по 5 мм). Пример оформления первой страницы расчетно-пояснительной записки приведен в приложении 3. Внизу каждой страницы, начиная со второй, должен быть штамп 15 мм, в котором проставляется номер страницы (см. приложение 4).
Выдача заданий и проверка курсовой работы. Студенты получают бланк задания на курсовую работу у своего преподавателя. Преподавателем регулярно проводятся консультации в специально отведенные для этого часы.
Курсовая работа в установленные кафедрой сроки должна быть проверена и подписана преподавателем. Дата защиты курсовой работы указывается в бланке задания.
Текущий контроль выполнения курсовой работы и оценку необходимых видов деятельности студента осуществляет преподаватель. Работа оценивается для студентов очной формы обучения по сто балльной системе:
| № аттестации | Вид деятельности студента при выполнении курсовой работы | баллы |
| 1. | Построение планов положений механизма | 1-3 |
| 2. | Построение планов скоростей механизма | 2-4 |
| 3. | Построение планов ускорений механизма | 2-4 |
| 4. | Составление схемы нагружения механизма внешними силами | 1-2 |
| 5. | Построение планов сил структурных групп | 4-6 |
| 6. | Определение уравновешивающего момента методом Жуковского | 2-4 |
| 7. | Расчет геометрических параметров зубчатых колес | 2-4 |
| 8. | Построение картины эвольвентного зацепления | 3-5 |
| 9. | Определение качественных характеристик эвольвентного зацепления | 5-7 |
| 10. | Построение треугольников распределения угловых скоростей многоступенчатых зубчатых механизмов | 6-8 |
| 11. | Определение передаточных отношений трехступенчатой передачи, планетарного и дифференциального механизмов | 2-3 |
| Итого | 30-50 | |
| Защита курсового проекта | ||
| 12. | Качество графического выполнения чертежей | 2-5 |
| 13. | Полнота выполнения графической части | 10-15 |
| 14. | Полнота и качество оформления пояснительной записки | 2-5 |
| 15. | Умение студента ориентироваться в теоретическом материале | 11-25 |
| Итого | 25-50 | |
| Всего | 55-100 |
РАЗДЕЛ I. «Кинематический и силовой анализ рычажного механизма»
Задание на лист №1
«Кинематический и силовой анализ рычажного механизма»
1. Определить степень подвижности и класс механизма.
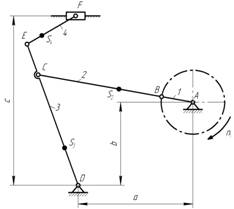
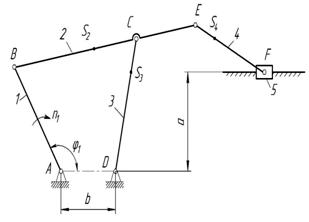
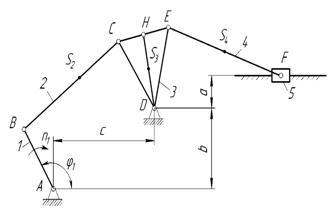
2. Построить 12 планов положений звеньев механизма и шатунную кривую точки S2 шатуна ВС.
Для заданного положения механизма:
3. Определить скорости точек и угловые скорости звеньев механизма методом планов скоростей.
4. Определить ускорения точек и угловые ускорения звеньев механизма методом планов ускорений.
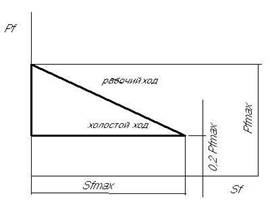
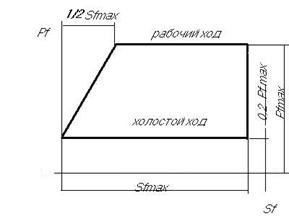
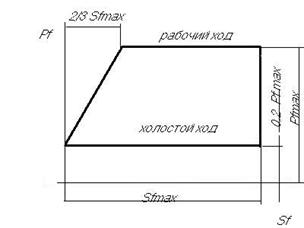
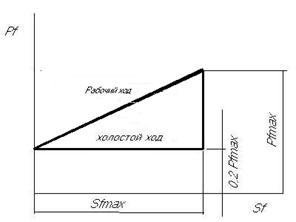
5. Составить схему нагружения механизма, определив: а) силы и моменты инерции звеньев; б) силу производственного сопротивления по графику; в) силы тяжести звеньев.
6. Определить реакции в кинематических парах и уравновешивающий (движущий) момент, действующий на кривошип АВ, методом планов сил.
7. Определить уравновешивающий (движущий) момент методом Жуковского.
Механизм № 1
| параметры | № вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| длины звеньев в метрах | LAB | 0,3 | 0,4 | 0,5 | 0,3 | 0,4 | 0,5 | 0,7 | 0,3 | 0,4 | 0,5 |
| LBC | 2,2 | 2,4 | 3 | 1,9 | 2,9 | 2,4 | 3,2 | 1,6 | 1,7 | 1,9 | |
| LCD | 1,2 | 1,5 | 1,7 | 1,2 | 1,6 | 1,7 | 2,2 | 1,2 | 1,5 | 1,7 | |
| LDE | 1,5 | 1,9 | 2,1 | 1,5 | 1,9 | 2,1 | 2,8 | 1,5 | 1,9 | 2,1 | |
| LEF | 0,8 | 0,7 | 0,75 | 0,65 | 0,9 | 0,85 | 0,95 | 0,75 | 0,65 | 0,7 | |
| LBS2 | 0,75 | 0,8 | 1,0 | 0,65 | 0,95 | 0,8 | 1,0 | 0,55 | 0,6 | 0,63 | |
| LDS3 | 0,5 | 0,63 | 0,69 | 0,49 | 0,63 | 0,69 | 0,92 | 0,49 | 0,63 | 0,7 | |
| LES4 | 0,8 | 0,35 | 0,37 | 0,33 | 0,45 | 0,43 | 0,47 | 0,37 | 0,33 | 0,43 | |
| a | 1,9 | 2,2 | 2,6 | 1,7 | 2,5 | 2,35 | 3,1 | 1,55 | 1,75 | 1,95 | |
| b | 0 | 0,25 | 0,3 | 0,2 | 0 | 0,8 | 0,9 | 0,5 | 0,95 | 1,1 | |
| c | 1,6 | 2 | 2,2 | 1,6 | 2 | 2,2 | 2,9 | 1,6 | 2 | 2,2 | |
| n1 , об/мин | 180 | 120 | 200 | 250 | 300 | 280 | 150 | 160 | 280 | 180 | |
| № положения механизма для силового расчета | 5 | 6 | 7 | 8 | 3 | 9 | 10 | 4 | 2 | 11 | |
| параметры | №№ вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
|
масса звеньев, кг | m2 | 80 | 96 | 120 | 76 | 116 | 96 | 128 | 64 | 68 | 76 |
| m3 | 60 | 76 | 84 | 60 | 76 | 84 | 112 | 60 | 76 | 84 | |
| m4 | 32 | 28 | 30 | 26 | 36 | 34 | 38 | 30 | 26 | 28 | |
| m5 | 180 | 185 | 190 | 210 | 230 | 200 | 210 | 190 | 170 | 190 | |
| моменты инерции, кгм2 | Is2 |
| |||||||||
| Is3 | |||||||||||
| Is4 | |||||||||||
| Сила сопротивления, Н | P fmax | 1400 | 2300 | 1800 | 2350 | 3000 | 2500 | 2200 | 3500 | 3200 | 1900 |
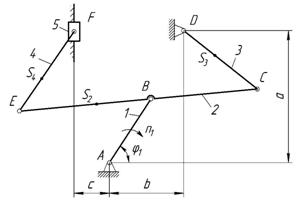
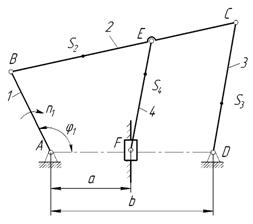
Механизм № 2

| Параметр | №№ вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| длины звеньев в метрах | LAB | 0,4 | 0,35 | 0,3 | 0,35 | 0,5 | 0,4 | 0,45 | 0,3 | 0,45 | 0,45 |
| LBC | 0,7 | 0,75 | 0,6 | 0,8 | 0,7 | 0,8 | 0,7 | 0,8 | 0,7 | 0,75 | |
| LCE | 1,5 | 1,45 | 1,3 | 1,6 | 1,6 | 1,6 | 1,5 | 1,6 | 1,5 | 1,4 | |
| LCD | 1,5 | 1,45 | 1,3 | 1,5 | 1,6 | 1,5 | 1,4 | 1,6 | 1,5 | 1,4 | |
| LEF | 1,3 | 1,35 | 1,2 | 1,3 | 1,4 | 1,3 | 1,2 | 1,4 | 1,4 | 1,2 | |
| LBS2 | 0,2 | 0,15 | 0,1 | 0,2 | 0,3 | 0,3 | 0,2 | 0,2 | 0,2 | 0,1 | |
| LCS3 | 0,7 | 0,7 | 0,6 | 0,7 | 0,8 | 0,8 | 0,7 | 0,8 | 0,7 | 0,6 | |
| LFS4 | 0,8 | 0,75 | 0,7 | 0,7 | 0,8 | 0,7 | 0,6 | 0,7 | 0,8 | 0,6 | |
| a | 1,2 | 1,25 | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 | |
| b | 0,4 | 0,35 | 0,3 | 0,4 | 0,2 | 0,3 | 0,2 | 0,8 | 0,3 | 0,4 | |
| c | 0,3 | 0,4 | 0,4 | 0,3 | 0,5 | 0,5 | 0,3 | 0,4 | 0,3 | 0,4 | |
|
n1, об/мин
| 280 | 230 | 300 | 160 | 250 | 270 | 240 | 290 | 260 | 200 | |
| № положения механизма для силового расчета | 2 | 5 | 8 | 11 | 9 | 10 | 4 | 6 | 3 | 10 | |
| параметры | №№ вариантов | |||||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||||||||
| масса звеньев, кг | m2 | 75 | 80 | 95 | 90 | 80 | 75 | 80 | 70 | 80 | 70 | |||||||
| m3 | 55 | 65 | 65 | 90 | 80 | 90 | 100 | 80 | 100 | 60 | ||||||||
| m4 | 44 | 60 | 65 | 60 | 70 | 70 | 60 | 50 | 60 | 60 | ||||||||
| m5 | 70 | 95 | 75 | 50 | 80 | 30 | 40 | 30 | 40 | 25 | ||||||||
| моменты инерции, кгм2 | IS2 |
| ||||||||||||||||
| IS3 | ||||||||||||||||||
| IS4 | ||||||||||||||||||
| сила сопротивления, Н | Рfma x | 2500 | 2400 | 2200 | 2100 | 2000 | 2300 | 3000 | 2500 | 2000 | 2200 | |||||||
Механизм № 3
| параметры | №№ вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| длины звеньев в метрах | LAB | 0,5 | 0,5 | 0,35 | 0,45 | 0,35 | 0,45 | 0,4 | 0,4 | 0,3 | 0,3 |
| LBC | 1,8 | 1,8 | 1,7 | 1,7 | 1,5 | 1,8 | 1,7 | 1,7 | 1,6 | 1,4 | |
| LCD | 1,65 | 1,6 | 1,5 | 1,5 | 1,3 | 1,6 | 1,4 | 1,45 | 1,5 | 1,2 | |
| LCE | 0,2 | 0,25 | 0,2 | 0,2 | 0,25 | 0,25 | 0,3 | 0,25 | 0,3 | 0,2 | |
| LEF | 1,9 | 1,95 | 1,85 | 2 | 1,8 | 1,9 | 1,9 | 1,8 | 1,9 | 1,6 | |
| LBS2 | 0,75 | 0,8 | 0,75 | 0,8 | 0,7 | 0,7 | 0,8 | 0,65 | 0,7 | 0,6 | |
| LCS3 | 0,9 | 0,85 | 0,75 | 0,9 | 0,8 | 0,9 | 0,9 | 0,8 | 0,8 | 0,7 | |
| LFS4 | 0,8 | 0,8 | 0,7 | 0,8 | 0,6 | 0,75 | 0,7 | 0,7 | 0,75 | 0,5 | |
| a | 0,8 | 0,4 | 0,5 | 0,5 | 0,7 | 0,7 | 0,6 | 0,6 | 0,4 | 0,8 | |
| b | 2 | 2,4 | 2,2 | 2,2 | 1,8 | 2,1 | 2 | 2,1 | 2,2 | 1,6 | |
|
n1, об/мин
| 300 | 260 | 220 | 170 | 180 | 250 | 290 | 150 | 200 | 250 | |
| № положения механизма для силового расчета | 8 | 10 | 7 | 3 | 5 | 2 | 11 | 6 | 9 | 10 | |
| параметры | №№ вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| Массы звеньев, кг | m2 | 80 | 100 | 100 | 90 | 110 | 80 | 90 | 80 | 80 | 90 |
| m3 | 100 | 110 | 120 | 100 | 100 | 100 | 110 | 100 | 120 | 100 | |
| m4 | 60 | 70 | 80 | 90 | 90 | 80 | 80 | 70 | 80 | 60 | |
| m5 | 50 | 40 | 50 | 60 | 50 | 40 | 60 | 50 | 40 | 50 | |
| моменты инерции, кгм2 | IS2 |
| |||||||||
| IS3 | |||||||||||
| IS4 | |||||||||||
| сила сопротивления, Н | Рfma x | 2000 | 2100 | 2200 | 2300 | 2400 | 2300 | 2200 | 2100 | 2000 | 2200 |
Механизм № 4
| параметры | №№ вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| длины звеньев в метрах | LAB | 0,4 | 0,5 | 0,3 | 0,5 | 0,6 | 0,4 | 0,45 | 0,55 | 0,6 | 0,5 |
| LBC | 1,4 | 1,5 | 1,55 | 1,5 | 1,4 | 1,45 | 1,4 | 1,5 | 1,55 | 1,45 | |
| LCD | 1,2 | 1,3 | 1,8 | 1,3 | 1,2 | 1,25 | 1,2 | 1,3 | 1,25 | 1,25 | |
| LBE | 0,6 | 0,75 | 0,7 | 0,75 | 0,7 | 0,6 | 0,6 | 0,7 | 0,7 | 0,7 | |
| LEF | 1,9 | 1,85 | 1,8 | 1,85 | 1,8 | 1,8 | 1,95 | 1,9 | 1,85 | 2 | |
| LBS2 | 0,5 | 0,7 | 0,7 | 0,7 | 0,7 | 0,6 | 0,5 | 0,6 | 0,7 | 0,6 | |
| LCS3 | 0,7 | 0,7 | 0,7 | 0,7 | 0,7 | 0,7 | 0,7 | 0,7 | 0,7 | 0,7 | |
| LES4 | 0,6 | 0,6 | 0,6 | 0,6 | 0,6 | 0,6 | 0,65 | 0,65 | 0,65 | 0,65 | |
| a | 0,9 | 0,8 | 0,9 | 0,8 | 1 | 1 | 0,7 | 0,6 | 0,7 | 0,6 | |
| b | 1,8 | 1,6 | 1,8 | 1,6 | 1,6 | 1,6 | 1,7 | 1,6 | 1,7 | 1,8 | |
|
n1, об/мин
| 280 | 170 | 260 | 200 | 190 | 210 | 190 | 250 | 300 | 240 | |
| № положения механизма для силового расчета | 10 | 6 | 8 | 11 | 9 | 5 | 7 | 2 | 3 | 4 | |
| параметры | №№ вариантов | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
|
массы звеньев, кг | m2 | 83 | 82 | 80 | 78 | 77 | 75 | 73 | 72 | 70 | 68 |
| m3 | 62 | 61 | 60 | 59 | 58 | 56 | 55 | 54 | 52 | 51 | |
| m4 | 54 | 60 | 60 | 59 | 58 | 56 | 55 | 54 | 52 | 51 | |
| m5 | 93 | 92 | 90 | 88 | 87 | 85 | 83 | 82 | 80 | 78 | |
| моменты инерции, кгм2 | Is2 |
| |||||||||
| Is3 | |||||||||||
| Is4 | |||||||||||
| Сила сопротивленияН | P fmax | 3000 | 2800 | 2500 | 2000 | 1800 | 2460 | 2500 | 2300 | 2800 | 3100 |
Механизм № 5
| параметры | №№ вариантов | ||||||||||








