 2020-01-15
2020-01-15 270
270
При наличии неуравновешенности вращающихся звеньев возникают значительные по величине и меняющиеся по направлению центробежные силы инерции. Они отрицательно влияют на опоры, являясь источником вибраций, вызывают изгиб ротора. При статической неуравновешенности ротора необходимо сместить центр масс в начало координат. Силы инерции при этом будут следующие –mrw2ℓ=Fц, ℓ–искомое расстояние, Fц – центробежная сила.
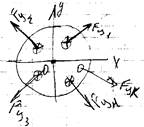
Вводим соответствующую корректировочную массу (mk):
m1r1w2+m2r2w2+m3r3w2+mkrkw2=0,
где ri– расстояние от оси вращения до массы.

В этом роторе главный вектор дисбалансов равен нулю. При моментной неуравновешенности ротора (главная центральная ось инерции ротора не параллельна оси ротора, но пересекает ее в центре масс ротора) вычисляется главный момент дисбалансов ротора MD = Smi[ℓi ei], где ei –эксцентриситеты – радиус-векторы центров заданных масс относительно оси ротора. Вводим две дополнительных плоскости и подбираем уравновешивающую массу в каждой плоскости.
Определение КПД механизмов. Мгновенный и цикловой КПД. КПД последовательных и параллельных соединений механизмов
Силы, действующие на механизм могут быть движущими и силами сопротивления. Движущие силы – это такие силы, которые осуществляют положительную работу (угол между направлением звена и направлением силы <90°). Силы сопротивления можно разделить на две категории: 1)силы полезного сопротивления (Fпс) – это те силы, которые надо преодолевать при полезной работе 2)силы вредного сопротивления (силы трения) Fвс = Fтр, т.к. они рассеивают энергию. КПД – это мера эффективности механизма, определяемая отношением полезной работы к подведенной при его работе (полной), т.е. h=Aпс (полезного сопротивления)/Aдв (движущие силы), т.к.
Aдс=Асп+Асв, то h=(Адс–Асв)/Адс = 1–Асв/Адс = 1–y,
где y – коэффициент потерь. При циклические движении механизма за один оборот повторяются технические и кинематические характеристики. h–цикловой КПД. Мгновенный КПД равен отношению мгновенных мощностей и этот КПД меняет в течении цикла свои значения: h=Pпс/Pдв. При последовательно соединенных механизмах общий КПД равен произведению КПД всех механизмов и применение механизма с низким КПД не выгодно. При параллельном соединении механизмов
Ai=Aдсgihi, h = SAi/Aдс=Sgihi,
при этом один из механизмов будет с малым КПД.
Динамическое исследование механизмов
Определение истинного движения начального звена механизма с учетом всех сил, действующих на механизм.
Основная задача: w1=w1(j), вспомогательная задача:
d=(wmax–wmin)/wср > [d]
m×x=Fx, m×y=Fy, J×j=M

Jпр×wср2/2=TS =S(mi×VSi2/2+JSiwi2/2),
Mпр– приведенный момент, Jпр – приведенный момент инерции, Т – кинетическая энергия.
Jпр= 2/wср2 × S(mi×VSi2/2 + JSi×wi2/2), Jпр=S(mi(VSi /wср)2+JSi(wi /w)2), V=S¢w – скорость с аналогом скорости,
A=S¢¢w2 – ускорение с аналогом ускорения. Определим момент сил, действующих на звено приведения:
Mпр×wср=S(Fi×VSi(cosa)+Miwi), Мпр=1/wсрS(Fi×VSi(cosa)+Miwi)= S(Fi×VSi×cosa /wср+Mi(wi/wср).
Определение момента инерции маховика методом профессора Мерцалова
TMM+TS–T0=SA,
где TMM– кинетическая энергия массовых масс, равная
TMM=Tmax–TЗВconst,
где Tmax– кинетическая энергия маховика, TЗВconst – кинетическая энергия звеньевых констант.
DTMM=(SA+T0–TS)max (при wmax)–(SA+T0–TS)min (при wmin). Т.к. Т0 =const, то: JMM/2(w2max–w2min)=(SA–TS)max–(SA–TS)min, JMM/2(wmax+wmin)(wmax–wmin)= (SA–TS)max–(SA–TS)min, JMMw2ср[d] =(SA–TS)max–(SA–TS)min, JMM = [(SA–TS)max–(SA–TS)min] / [d]wср2, Jmax = JMM –JЗВconst.
Этот момент считается приблизительно, т.к. мы среднее значение определяем грубо (не точно) – по графику.
Определение момента инерции маховика методом Виттенбауэра (метод энергомасс)
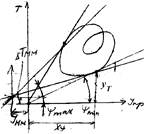
Tg ymin=yT/xy, т.к. T=yT×mT, а Jпр=хymy, то tgymin =(T/mT)/(Jпр/my)=Tmy/(JпрmТ).
Перенеся масштабные коэффициенты в левую часть получим:
tgy ×mT/my=T/Jпр = Jпр×(w2min/2)/Jпр = wmin2/2, т.е. w2min=2mT/my tgymin (1).
По этому графику можно определять момент инерции маховика:
wср=(wmax+wmin)/2 (2), d=(wmax–wmin)/wср (3).
Из формулы (3) получаем wmax=d×wср+wmin. Из формулы (2) получаем: wmin=2wср–wmax. Подставив wmax в это выражение получаем:
wmax = dwср+2wср+wmax, = wср(1+d/2)
wmin = wср(1–d/2).
Подставив полученное в выражение (1), получим:
wmax2=wср2(1+d+d2/4)» wср(1+d), w2min = wср2(1–d+d2/4)»w2ср(1–d), т.к. d –
малая величина, то d2/4 будет еще меньше, следовательно, ей можно пренебречь, тогда:
wср2(1+d)=2mT/my× tgymax
w2ср(1–d)=2mT/my× tgymin.
Типы и виды механизмов с высшими кинематическими парами
Среди механизмов с высшими кинематическими парами наибольшее распространение получили зубчатые, кулачковые, фрикционные, мальтийские и храповые механизмы.
В зубчатых передачах различают внешнее, внутренне и реечное зацепление. В зависимости от расположения осей могут быть с параллельными осями (цилиндрические), с пересекающимися осями (конические) и со скрещивающимися осями или гиперболоидные передачи (винтовые, червячные).
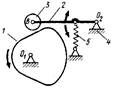
В кулачковых механизмах высшая пара образована звеньями, называемыми кулачок и толкатель (звено 1 и 2). Замыкание силовое, с помощью пружины. Форма входного звена – кулачка определяет закон движения выходного звена – толкателя.
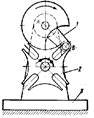
В фрикционном механизме передача вращательного движения осуществляется посредством трения между звеньями, образующими высшую кинематическую пару. Простой фрикционный механизм состоит из двух вращающихся круглых цилиндров 1,2 и стойки 3. Силовое замыкание высшей пары осуществляется пружинами. При постоянной угловой скорости диска 1 посредством перемещения колеса 2 вдоль своей оси можно плавно изменять его угловую скорость и даже направление вращения.

Мальтийский механизм преобразует непрерывное вращение входного звена – кривошипа 1 в прерывистое вращение выходного звена – креста 2. Механизм имеет стойку 3 и высшую пару, образованную цевкой В кривошипа и пазом креста.
Храповой механизм с ведущей собачкой и стойкой 4 служит для преобразования возвратно-вращательного движения коромысла 1 с собачкой 2 в прерывистое вращательное движение храпового колеса 3. Собачка 5 с пружиной 6 не дает колесу вращаться в обратную сторону. Высшая КП здесь образована собачкой и храповым колесом.









