2020-01-15
2020-01-15 253
2531) смещение равно 0
2) Начальная прямая, которая катится без скольжения в процессе нарезания зубчатых колес Хm>1 Þ это случай положительного смещения.

3) Xm<0 – случай отрицательного смещения.
начальная прямая

xΣ – суммарный коэф-т смещения x1+x2=xΣ, y – коэф-т воспринимаемого смещения, Δy – коэф-т уравнительного смещения.
Δy= xΣ–y
Передаточное отношение одно- и многоступенчатых зубчатых передач с неподвижными осями вращения
Одноступенчатая передача с внешним зацеплением. Особенность: меняет знаки.
u12=±ω1/ω2, ω1=vk/r1, ω2=vk/r2.

Одноступенчатая зубчатая передача с внутренним зацеплением. Особенность: не меняет знаки.

Подставим ω1 и ω2 в формулу для передаточного отношения u12:
u12=±r2/r1=±z2/z1.
Многоступенчатая зубчатая передача с неподвижными осями (односторонние зубчатые передачи соединены последовательно:

u16 = u12 ∙ u34 ∙ u56 = (-1)ω1/ω2 ∙ ω3/ω4 ∙ (-1)ω5/ω6 = ω1/ω2 ∙ ω3/ω4 ∙ ω5/ω6 = (-1) z2/z1 ∙ z4/z3 ∙ (-1) z6/z5
Передаточное отношение многоступенчатой зубчатой передачи = передаточному отношению входному колесу от выходного колеса.
z2∙z4∙z6 - произведение числа зубьев ведомых колес.
z1∙z3∙z5 - произведение числа зубьев ведущих колес. Тогда
Uвх/вых = Пzведомых колес/Пzведущих колес × (-1)k,
где k – число внешних зацеплений.
Определение передаточного отношения планетарного механизма аналитическим методом (методом обращения движения)
Если одно из центральных колес многоступенчатого зубчатого механизма неподвижно, то она называется планетарным механизмом.
Число степеней свободы W=3n-2p1-
-2p2=3∙3-2∙3-2=1
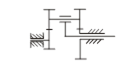
Планетарный механизм, имеющий неподвижное звено всегда можно превратить в дифференциал, и наоборот. Это и есть свойство обратимости планетарных механизмов. Основная идея метода Виллиса (метода обращения движения): берем центральное звено планетарного механизма и даем ему дополнительное вращение равное скорости вращения водила, но направленное в противоположную сторону. Тогда водило становится неподвижным звеном и механизм из планетарного превращается в зубчатый механизм с неподвижными осями колес (обращенный механизм), состоящий из нескольких последовательных соединенных пар зубчатых колес.
| Движение | Z1 | в | Z4 |
| действит. | Ω1 | ωв | 0 |
| Дополнит | -ωв | -ωв | -ωв |
| суммарное | ω1-ωв | 0 | -ωв |
Передаточное отношение обращенного механизма имеет вид:
u14(в)=(ω1-ωв)/(-ωв)=(-1)2z2z4/z1z3
u1в(4)=ω1/ωв=1-u14(в)
u1в - передаточное отношение планетарного механизма.
uв1(4)=1/u1в(4)=1/1-u14(в)
Передаточное отношение от четвертого колеса к водилу, если первое колесо остановлено:
u4в(1)=1-u41(в)
uв4(1)=1/u4в(1)=1/1-u41(в)
u1в(4)=1/1-u14(в)=1-z2z4/z1z3=1-99∙101/100∙100=0,0001
uв1(4)=1/u1в(4)=10000
Т.е. при одном обороте водила колесо повернется на 0,0001.
Передаточное отношение планетарного механизма по методу баланса мощностей в балансу моментов
u1в -?

u1в=1-u14(в)=1-(-1)2z2z4/z1z3=1-r2r4/r1r3
⌠M1ω1+Mвωв=0
│M1+Mв+M4=0
ω1/ωв=-Mв/M1=(M1+M4)/M1=1+M4/M1
M1=F12∙r1, M4= -F43∙r4, F34∙r3=F21∙r2,
F34= F21∙ r2/r3, F43= -F34= -F21∙ r2/r3,
u1в=ω1/ωв=1+M4/M1=1-F12∙r2∙r4/F12∙r1∙r3=1-r2r4/r1r3
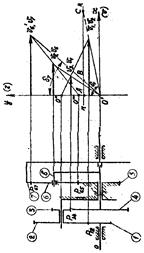
Передаточное отношение планетарных механизмов графическим методом