 2020-01-15
2020-01-15 819
819Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Но несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем. 
1. Последовательное соединение (рис.28) - выходная величина предшествующего звена подается на вход последующего.
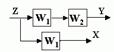
2. Параллельно - согласное соединение (рис.29) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются.
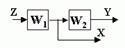
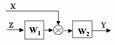
3. Параллельно - встречное соединение (рис. 30а) - звено охвачено положительной или отрицательной обратной связью.
4. При переносе сумматора через звено по ходу сигнала необходимо добавить звено с передаточной функцией того звена, через которое переносится сумматор. Если сумматор переносится против хода сигнала, то добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим сумматор.
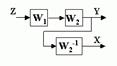
5. При переносе узла через звено по ходу сигнала добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим узел. Если узел переносится против хода сигнала, то добавляется звено с передаточной функцией звена, через которое переносится узел.
6. Взаимные перестановки узлов и сумматоров: узлы можно менять местами; сумматоры тоже можно менять местами, но при переносе узла через сумматор необходимо добавить сравнивающий элемент.
 Параллельно - согласное соединение (рис.29) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются. Тогда: y = y1 + y2 +... + yn = (W1 +W2 +... + W3)yo = Wэкв
Параллельно - согласное соединение (рис.29) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются. Тогда: y = y1 + y2 +... + yn = (W1 +W2 +... + W3)yo = Wэкв  yo, где
yo, где  .
.
То есть цепочка звеньев, соединенных параллельно - согласно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.
17) Структурные схемы и их преобразования. Неединичная и единичная обратная связь.
Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Но несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем. 
1. Последовательное соединение (рис.28) - выходная величина предшествующего звена подается на вход последующего.
2. Параллельно - согласное соединение (рис.29) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются.
3. Параллельно - встречное соединение (рис. 30а) - звено охвачено положительной или отрицательной обратной связью.
4. При переносе сумматора через звено по ходу сигнала необходимо добавить звено с передаточной функцией того звена, через которое переносится сумматор. Если сумматор переносится против хода сигнала, то добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим сумматор.
5. При переносе узла через звено по ходу сигнала добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим узел. Если узел переносится против хода сигнала, то добавляется звено с передаточной функцией звена, через которое переносится узел.
6. Взаимные перестановки узлов и сумматоров: узлы можно менять местами; сумматоры тоже можно менять местами, но при переносе узла через сумматор необходимо добавить сравнивающий элемент.
Единич и неединич обратная связь:
 Мысленно разрываем связь E(t) = g(t) ± x’(t). Преобразование Лапласа: E(S) = G(S) ± X(S)W2. Замыкаем разорванную связь. X(S) = E(S)W1 = [G(S) ± X(S)W2]W1, W(S) = X(S)/G(S) = W1/(1 минус плюс W1W2) ± - положит обратная связь – W1/(1-W1W2) минус плюс - отриц обр связь – W1/(1+W1W2)
Мысленно разрываем связь E(t) = g(t) ± x’(t). Преобразование Лапласа: E(S) = G(S) ± X(S)W2. Замыкаем разорванную связь. X(S) = E(S)W1 = [G(S) ± X(S)W2]W1, W(S) = X(S)/G(S) = W1/(1 минус плюс W1W2) ± - положит обратная связь – W1/(1-W1W2) минус плюс - отриц обр связь – W1/(1+W1W2)
18) Правило переноса узла:
При переносе узла по направлению передачи сигнала необходимо в линию обратной связи поставить звено с обратной передаточной функцией того звена, через которое перенесли узел. Нарисовать рисунок.
При переносе узла через звено против направления передачи сигнала нужно в линию обратной связи вставить звено с передаточной функцией того звена через которое перенесли узел. Нарисовать рисунок.
|  
|
19). Правило переноса сумматора и их перестановок
При переносе сумматора по направлению передачи сигнала нужно в линию по 2-ой связи сумматора вставить звено с передаточной функцией = передаточной функции того звена через которое перенесли сумматор. Рисунок нарисовать.
При переносе сумматора через звено против направления передачи сигнала нужно по 2-ой линии связи сумматора вставить звено с ПФ = обратной ПФ того звена через которое перенесли сумматор. Рисунок нарисовать.
|  
|
Перестановка сумматоров результата не меняет – выходной сигнал не изменяется.

| 
|
20) Характеристики динамических звеньев. Частотные характеристики
Частотные характеристики
Рассмотрим передаточную функцию, состоящую из n-го количества элементов.
Последовательность выражений позволяет найти амплитуду и фазу колебаний на выходе системы при гармоническом воздействии на ее входе.
Модуль этого выражения показывает, во сколько раз увеличивается или уменьшается амплитуда колебаний на выходе системы по сравнению с амплитудой колебаний на входе.
Аргумент вектора F(jω) описывает фазовый угол колебаний по отношению колебаниям на входе => (*) определяет частотную характеристику, называемую амплитудно-фазовой частотной характеристикой (АФЧХ).
АФЧХ строится на комплексной плоскости  j – мнимая единица.
j – мнимая единица.
 - коэффициент, характеризующий изменение амплитуды при изменении частоты, при изменяющейся частоте, называется амплитудно-частотной характеристикой (АЧХ).
- коэффициент, характеризующий изменение амплитуды при изменении частоты, при изменяющейся частоте, называется амплитудно-частотной характеристикой (АЧХ).
 дает представление о фазовом сдвиге выходных колебаний и он называется фазово-частотной характеристикой (ФЧХ)
дает представление о фазовом сдвиге выходных колебаний и он называется фазово-частотной характеристикой (ФЧХ)
Вещественные или мнимые частотные характеристики связаны с АЧХ и ФЧХ следующим образом:
При анализе САР на устойчивость и качества процесса регулирования, а также при решении других задач, часто обращаются к ЛЧХ
Усиление L(ω) = 20lg|Ф(jω)| = 20lgA(ω) [дБ] – является единицей логарифмической относительно величины. Изменения относительно двух величин в 10 раз соответствует изменению усиления на 20 дБ.
Известно, что АЧХ представляет собой отношение 2-х амплитуд: входного и выходного сигналов.
21) Характеристики динамических звеньев. Прееходная функция системы
Переходная функция системы
Переходной функцией САР называется переходный процесс системы, вызванный единичным ступенчатым воздействием при нулевых начальных условиях. Используя понятие передаточной функции замкнутой системы и обратное преобразование Лапласа можно для переходной функции системы записать выражение:  . Если изображение управляющего сигнала G(S) является изображением единичного ступеньчатого воздействия, то его можно представить как
. Если изображение управляющего сигнала G(S) является изображением единичного ступеньчатого воздействия, то его можно представить как  , тогда выражение будет определять переходную функцию в следующем виде:
, тогда выражение будет определять переходную функцию в следующем виде:  - эта формула характеризует реакцию системы при единичном скачке и является переходной функцией.
- эта формула характеризует реакцию системы при единичном скачке и является переходной функцией.
22). Статическое и астатическое регулирование
Системы стабилизации, программного управления и следящие системы можно разделить на 2 группы:
1 – астатические; 2 - статические;

САР будет статической по отношению к возмущающему или управляющему воздействиям, если при стремлении к возмущающему или управляющему воздействиям постоянной величины, отклонению регулируемой величины также стремится к постоянной величине, отличной от 0 и зависящей от величины приложенного воздействия.
САР явл-ся астатической по возмущению или управляющему воздействию, если при стремлении возмущающего или управ-го воздействия постоянной величины отклонения регулируемая величина стремится к нулю и не зависит от величины приложенного воздействия. Одна и та же САР может быть астатической по управлению и статической по возмущению, либо наоборот.
23) Типовые звенья. Идеально интегрирующее звено
В курсе ТАУ изучаются следующие типы звеньев:
1. Пропорциональное звено;
2. Интегрирующее звено;
3. Дифференцирующее звено;
4. Апериодическое звено 1-го порядка;
5. Реальное дифференцирующее звено;
6. Форсирующее звено 1-го порядка;
7. Колебательное звено;
8. Апериодическое звено 2-го порядка;
9. Звено чистого запаздывания.
Интегрирующее звено
Интегрирующие звенья подразделяются на идеальные и реальные. Общим свойством этих звеньев является пропорциональность производной от выходной величины мгновенному значению входной величины. У реального интегрирующего звена пропорциональность устанавливается после завершения переходного процесса в звене.
Идеальному интегрирующему звену соответствует уравнение
Уравнению (3.44) соответствует интегральное уравнение
из которого видно, что звено интегрирует входной сигнал. Переходную функцию получим из (3.45), полагая
Импульсная переходная функция идеального интегрирующего звена (рис. 3.6, б)
Передаточная функция идеального интегрирующего звена
А.ф.х. идеального звена
на комплексной плоскости (рис. 3.6, е) представляет собой прямую, совпадающую с мнимой осью. А.ч.х. (рис. 3.6, в)
является гиперболой, стремящейся к бесконечности при Ф.ч.х. идеального интегрирующего звена (рис. 3.6, г)
свидетельствует, что фазовый сдвиг не зависит от частоты и равен Л.а.ч.х. представляет собой прямую с наклоном –20 дБ/декаду и проходит через точки
Дифференциальное уравнение реального интегрирующего звена
а передаточная функция
Звено с передаточной функцией (3.54) может рассматриваться как последовательное соединение идеального интегрирующего звена с передаточной функцией 1/p и статического инерционного звена первого порядка с постоянной времени T и коэффициентом передачи K. Все частотные характеристики реального интегрирующего звена могут быть получены по правилам перемножения комплексных величин.
24) Типовые звенья. Апериодическое звено 1-го порядка (Инерционное) В курсе ТАУ изучаются следующие типы звеньев: 1. Пропорциональное звено; 2. Интегрирующее звено; 3. Дифференцирующее звено; 4. Апериодическое звено 1-го порядка; 5. Реальное дифференцирующее звено; 6. Форсирующее звено 1-го порядка; 7. Колебательное звено; 8. Апериодическое звено 2-го порядка; 9. Звено чистого запаздывания. Апериодическое звено первого порядка Передаточная функция:
Уравнение звена
Уравнение АЧХ и ФЧХ Получим аналитические выражения для АЧХ и ФЧХ. Амплитудная частотная характеристика:
Фазовая частотная характеристика:
АФЧХ
Пример ЛАЧХ и ЛФЧХ апериодического звена для К>1.
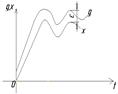
25). Типовые звенья. Колебательное звено В курсе ТАУ изучаются следующие типы звеньев: 1. Пропорциональное звено; 2. Интегрирующее звено; 3. Дифференцирующее звено; 4. Апериодическое звено 1-го порядка; 5. Реальное дифференцирующее звено; 6. Форсирующее звено 1-го порядка; 7. Колебательное звено; 8. Апериодическое звено 2-го порядка; 9. Звено чистого запаздывания. Колебательное звено Передаточная функция: где К – статический коэффициент передачи [К=W(0)], Т – постоянная времени (единица измерения – секунды), μ – коэффициент демпфирования (безразмерная величина), находится в пределах 0<μ<1. Свойства колебательного звена зависят от значения полюсов его передаточной функции, т.е. от корней уравнения: При 0<μ<1 получим два комплексно-сопряженных корня. Уравнение звена: Переходная функция колебательного звена описывается формулой: Колебательный характер переходной функции определяется наличием в ней периодических функций синуса и косинуса. Колебания будут затухать с течением времени, т.к. множитель при этих функциях В автоматических системах различают свободные и вынужденные колебания. Вынужденные колебания выходной величины звена возникают из-за колебаний воздействия (например, при синусоидальном воздействии). Колебания переходной функции колебательного звена – это свободные колебания: воздействие на звено не периодическое, а колебания возникают из-за собственных колебательных свойств звена. Можно сделать следующие выводы о виде переходной функции: 1) Установившееся значение переходной функции равно К: 2) Модуль мнимой части полюсов передаточной функции Ω представляет собой угловую частоту колебаний. Период колебаний равен 2π/ω. 3) Модуль действительной части полюсов передаточной функции α определяет скорость затухания колебаний. Чем больше α, тем быстрее затухают колебания. При одной и той же постоянной времени Т колебания будут затухать тем быстрее, чем больше значение коэффициента демпфирования μ.
|
 .
.
 ,
,
 (рис. 3.6, а):
(рис. 3.6, а): .
.
 .
.
 .
.


 .
.
 .
. ;
;  (рис. 3.6, д):
(рис. 3.6, д): .
.
 ,
,
 .
.
 , где K – статический коэффициент передачи, Т – постоянная времени (измеряется в секундах).
, где K – статический коэффициент передачи, Т – постоянная времени (измеряется в секундах).
 Статическая характеристика: yст =W(0)·xст= К·xст (как у пропорционального звена). Переходная функция:
Статическая характеристика: yст =W(0)·xст= К·xст (как у пропорционального звена). Переходная функция:  . Зависимость h(t) – экспоненциальная.
. Зависимость h(t) – экспоненциальная.
 Годограф Найквиста для апериодического звена имеет вид полуокружности.
Годограф Найквиста для апериодического звена имеет вид полуокружности.
 ,
, .
. , где
, где  ,
,  .
.

 уменьшается с увеличением времени и стремится к нулю при (t→∞).
уменьшается с увеличением времени и стремится к нулю при (t→∞). .
.
26) .Типовые звенья, диф звена 1-го порядка
В курсе ТАУ изучаются следующие типы звеньев:
1. Пропорциональное звено;
2. Интегрирующее звено;
3. Дифференцирующее звено;
4. Апериодическое звено 1-го порядка;
5. Реальное дифференцирующее звено;
6. Форсирующее звено 1-го порядка;
7. Колебательное звено;
8. Апериодическое звено 2-го порядка;
9. Звено чистого запаздывания.










