 2020-01-15
2020-01-15 145
145Проанализируем потребную мощность привода в режимах максимальной скорости и максимального ускорения
 (13)
(13)
На курсовой дальности Dк=500 м максимум мощности наблюдается при р=0,5 км (рис. 3) и составляет 7,6 Вт

|

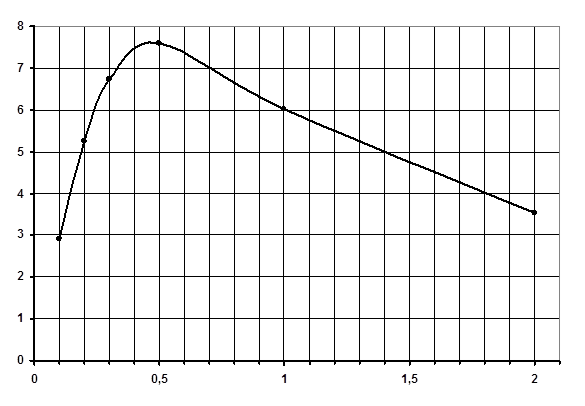
Рис. 3. - График потребной мощности горизонтального канала на  для всех параметров
для всех параметров  .
.
Мощность, развиваемая ИД, затрачивается не только на преодоления моментов сопротивления и момента инерции нагрузки, но и собственных моментов ИМ, поэтому исполнительный двигатель должен быть выбран с запасом по мощности. Обеспечение высокой характеристики плавности требует выбора двигателя с запасом по мощности не более 10 раз.
В качестве исполнительного элемента могут применяться двигатели постоянного тока, переменного тока, электромагнитные муфты с приводным двигателем. В результате анализа аппаратного состава, динамики электрических массовых характеристик, надежности и технологичности выявляются мощностные диапазоны преимущественного применения того или иного типа исполнительного элемента. В диапазоне мощностей до 500 Вт электропривод постоянного тока развивает большие ускорения, позволяющие сформировать широкополосный контур управления. Малые ошибки и высокая добротность, применение эффективных схем нелинейного управления позволяют обеспечивать высокую точность и плавность слежения.
Главным преимуществом двигателей постоянного тока с независимым и магнитоэлектрическим возбуждением является линейность их механических и регулировочных характеристик, что наряду с хорошими энергетическими характеристиками стало причиной их широкого распространения в качестве исполнительных элементов следящих систем.
Наилучшими характеристиками среди двигателей постоянного тока считают малоинерционные электродвигатели с возбуждением от постоянных магнитов и гладким якорем (серии ДПР, ДПМ, ДП, ЭДМ, МИГ), но они используют в своей конструкции дефицитные редкоземельные металлы и имеют высокую стоимость. В качестве исполнительного элемента привода был выбран двигатель постоянного тока ДП 60-90-6-Р10, реверсивный, малоинерционный, постоянного тока, малой мощности с гладким якорем, возбуждающий от постоянных магнитов, предназначен для приводов следящих систем.
| ДП 60-90-6-Р10 | |
| Номинальное напряжение | 
|
| Номинальная мощность | 
|
| Номинальная скорость | 
|
| Номинальный момент | 
|
| Номинальная сила тока | 
|
| Пусковой момент | 
|
| Сопротивление якоря | 
|

| |
| Момент инерции двигателя | 
|
| Момент трения двигателя | 
|
В качестве датчика скорости двигателя будем использовать тахогенератор постоянного тока, установленный непосредственно на валу исполнительного двигателя. Тип тахогенератора определяется типом исполнительного двигателя. Он должен обладать наибольшей крутизной, что обеспечивает преодоление зашумлённости измеряемого сигнала на малых скоростях движения, малыми статическими и инерционными моментами, наибольшим ресурсом. Указанным требованиям удовлетворяет тахогенератор постоянного тока 2,5ТГП–6, имеющий следующие паспортные характеристики:
| 2,5ТГП-6 | |
| Номинальная скорость |
|
| Крутизна выходного сигнала | 
|
| Момент инерции тахогенератора | 
|
| Момент трения тахогенератора | 
|
Примем:
| Момент трения редуктора | 
|
| Момент инерции редуктора | 
|








