2020-01-15
2020-01-15 158
158Элементом автоматики называется обособленная часть схемы автоматики, функционально выполняющая свою функцию (например усилитель, стабилизатор).
Элементы автоматики делятся на:
1. Датчики – это элемент автоматики, функционально преобразующий
входную физическую величину в сигнал, удобный для измерения и дальнейшей обработки.
2. Усилитель – это устройство, предназначенное для усиления входных сигналов в виде определенной физической величины (усилитель напряжения, или тока, усилия, давления).
3. Стабилизатор – элемент автоматики, предназначенный для поддержания постоянства физической величины на своем выходе (например, стабилизаторы напряжения, тока, давления).
4. Переключающее устройство – это элемент автоматики, предназнач-енный для коммутации электрических цепей.
5. Исполнительные устройства – это элементы автоматики приводящие в действие регулирующие органы объектов регулирования (электродвигате-ли, электромагнитные муфты, электромагниты).
Датчики
Структурная схема датчика

Датчик состоит из двух элементов:
1. Чувствительный элемент – служит для преобразования входной физической величины в сигнал, удобный для измерения.
2. Преобразователь – служит для преобразования входной величины в электрический сигнал.
Классификация датчиков:
1. По принципу действия датчики разделяются на параметрические и генераторные.
Параметрическими называются датчики, преобразующие входную физическую величину в один из параметров электрической цепи (напряжение, ток, индуктивное, активное или реактивное сопротивление).
Генераторные датчики – это датчики, преобразующие входную физическую величину в Э.Д.С.
1. По виду входной величины бывают: датчики перемещения, датчики
давления, температуры, скорости, ускорения, усилия и т.д.
3. По виду входного сигнала бывают электрические и неэлектрические.
4. По характеру выходного сигнала бывают непрерывные и дискретные.
Основные параметры датчиков:
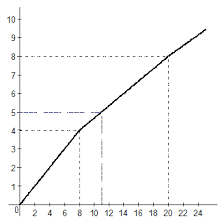
1. Статические характеристики  выражает зависимость выходной величины датчика от входной величины.
выражает зависимость выходной величины датчика от входной величины.
2. Статический коэффициент преобразования (передатчик) 
определяется отношением выходной величины к входной.
3. Динамический коэффициент преобразования:  определяется отношением приращений выходной величины к приращению входной или производной выходной величины по входной.
определяется отношением приращений выходной величины к приращению входной или производной выходной величины по входной.
4. Относительный коэффициент преобразования:  определяется отношением относительного приращения выходной величины к относительному приращению входной величины.
определяется отношением относительного приращения выходной величины к относительному приращению входной величины.
5. Порог чувствительности – наименьшее значение входного сигнала Umin, Pmin, вызывающее изменение выходного сигнала.
6. Инертность датчика – это величина изменения (отставания изменения) выходной величины датчика при изменении входной величины.
7. Абсолютная погрешность датчика – определяется как разница между фактическим (Y1) и измеренным (Y) значением выходной величины  .
.
8. Относительная погрешность  - определяется как отношение абсолютного значения погрешности выходной величины к ее расчетному значению, уменьшенному на 100%.
- определяется как отношение абсолютного значения погрешности выходной величины к ее расчетному значению, уменьшенному на 100%.