 2020-01-14
2020-01-14 126
126Математическое описание построения кольцевого фильтра
Кольцевой фильтр необходим для исследования изображения с помощью локального метода. Именно кольцевой фильтр позволяет наиболее верно вычислить кривизну структурных элементов изображения.
Алгоритм вычисления точек кольцевого фильтра основан на соотношении сторон прямоугольного треугольника.
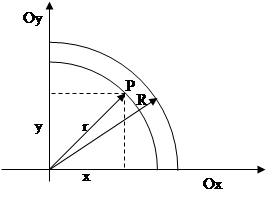 |
Рис. 2.1
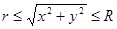
Исходя из рисунка, точка P(x,y) – является точкой фильтра, если выполняется следующее условие:
 (2.1)
(2.1)
Математическое описание вычисления центра масс
Под “массой пиксела” в данной работе понимается значение цвета пиксела/9/. Для вычисления центра масс относительно текущей точки, необходимо вычислить сумму “масс” пикселей попавших в фильтр, центр которого находится в текущей точке.
 , (2.2)
, (2.2)
где N – количество пикселов в фильтре,
p(i, j) – “вес” пиксела.
Рассчитываются вес пикселей по оси Ox:
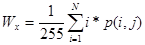 , (2.3)
, (2.3)
и вес по оси Oy:
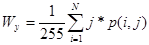 , (2.4)
, (2.4)
Смещение по оси Оx к центру “тяжести” пикселей, относительно текущей точки:
 , (2.5)
, (2.5)
Смещение по оси Оy к центру “тяжести” пикселей, относительно текущей точки:
 , (2.6)
, (2.6)
Координаты центра тяжести P(i, j):
 , (2.7)
, (2.7)
 , (2.8)
, (2.8)
где u,v – координаты центра фильтра.
Математическое описание алгоритма вычисления кривизны
Кривизна вычисляется для точки, принадлежащей линии. Поэтому необходимое условие выполнения алгоритма – совпадение центра фильтра и точки на линии. Геометрическое расположение фильтра и линии показано на рис. 2.2
Вычисление кривизны
|

Cf – центр фильтра; P1,P2 – точки линии, попавшие в фильтр;
r – радиус фильтра; h – смещение центра масс от центра фильтра;
l - расстояние от центра масс до точки пересечения линии рисунка и фильтра; M – центр масс; О – центр окружности на изображении;
R – радиус окружности на изображении;
Рис.2.2
Рассмотрим треугольник ΔСfMP2.Из соотношения гипотенузы и катетов в прямоугольных треугольниках, следует:
 (2.9)
(2.9)
Из прямоугольного треугольника ΔOMP2 следует:
 (2.10)
(2.10)
Из (2.9) выразим l2, получим:
 (2.11)
(2.11)
Подставив в (2.10), получим:
 (2.12)
(2.12)
Раскроем скобки:
 (2.13)
(2.13)
Для получения h, сделаем несколько преобразований:
 , (2.14)
, (2.14)
 , (2.15)
, (2.15)
 , (2.16)
, (2.16)
Нормируем h по r:
 (2.17)
(2.17)
Дифференцируем (2.17) по r /10/:
 (2.18)
(2.18)
Из выше приведенной формулы видно, что кривизна обратно пропорциональна радиусу исследуемой линии. Так как линии могут быть различны по виду, не одинаковы на отдельных участках, то, соответственно, и кривизна этих участков будет различаться. К тому же при изменении радиуса кольцевого фильтра наблюдается изменение вычисленной кривизны для одной и той же точки линии. Рассмотрим различные виды линий.
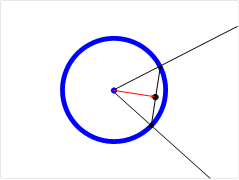
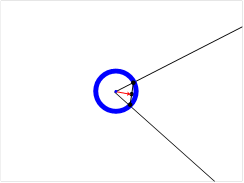
Окружность. При обработке фильтрами различных радиусов (рис 2.3), кривизна остается постоянной (рис.2.4), т.к. радиус окружности – величина постоянная.
Окружность | |
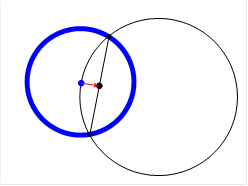
| 
|
| a) обработка фильтром большого радиуса; | б) обработка фильтром маленького радиуса; |
| Рис.2.3 | |
График зависимости кривизны от радиуса фильтра для окружности
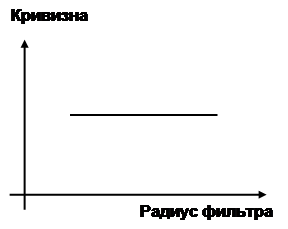
Рис.2.4
Кривая. При обработке фильтрами различных радиусов (рис 2.5), кривизна постоянно меняется (рис.2.6), т.к. изменяется радиус окружности, которую можно вписать между центром фильтра и точками линии, попавшими в фильтр.
Угол. При обработке фильтрами различных радиусов (рис 2.7), кривизна меняется пропорционально изменению радиуса фильтра (рис.2.8), т.к. пропорционально изменяется радиус окружности, которую можно вписать между центром фильтра и точками линии, попавшими в фильтр.
| Кривая | |

| 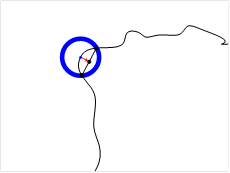
|
| a) обработка фильтром большого радиуса; | б) обработка фильтром маленького радиуса; |
| Рис.2.5 | |
График зависимости кривизны от радиуса фильтра для кривой
 |
Рис.2.6
| Угол | |
| 
|
| a) обработка фильтром большого радиуса; | б) обработка фильтром маленького радиуса; |
| Рис.2.7 | |
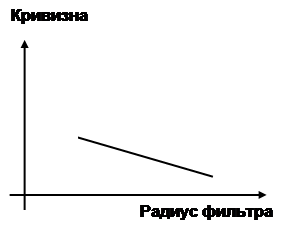 График зависимости кривизны от радиуса фильтра для угла
График зависимости кривизны от радиуса фильтра для угла
Рис.2.8








