2020-01-14
2020-01-14 151
151
iRobot Create имеет следующие внешние датчики (рисунки 2.10, 2.11):
– два датчика столкновения, для обнаружения удара слева или справа. Они расположены внутри бампера робота;
– инфракрасный приемник, расположенный сверху на передней части робота (используется вместе с виртуальной стеной, домашней базой);
– датчики спада, находящиеся на ведущих колесах, переднем и заднем ролике;
– четыре ИК-датчика, расположенных под бампером.
К внутренним датчикам относятся:
– датчик, показывающий превышение потребляемого тока левым колесом;
– датчик, показывающий превышение потребляемого тока правым колесом;
– два одометра, расположенных на ведущих колесах;
– напряжение батареи;
– температура батареи;
– датчик заряда батареи.
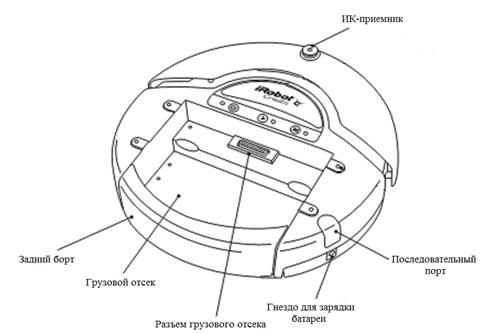
Рисунок 2.10 – iRobot Create (вид сверху)

Рисунок 2.11 – iRobot Create (вид снизу)
РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ДЛЯ IROBOT