 2020-01-14
2020-01-14 380
380Датчики соударений и наклона
Как правило, датчик соударений представляет собой выключатель, подающий информацию логического типа. Выключатель может находиться в одном из двух положений - разомкнутом или замкнутом. Может показаться, что эту информацию легко преобразовать для использования в программе.
В физическом смысле датчики соударений представляют собой выключатели концевого типа, или кнопки [14].
Они используются в качестве бамперов мобильных роботов на колесах, а также для остановки вращения оси, пришедшей в положение соприкосновения с ограничительным упором.
На рисунке 2.1 представлены схемы интерфейса для датчиков такого типа.
Как правило, в состоянии покоя выключатель находится в разомкнутом положении, но это необязательно. Важным является то, что, когда датчик находится в состоянии покоя, в центр управления подается верхний уровень напряжения, определяемый нагрузочным резистором. Это необходимо по двум причинам. Первая заключается в потребляемом токе, так как предполагается использование датчика только в определенные моменты, а вторая – в том, что резистор зачастую устанавливается на плате управления, вблизи физических входов процессора.

Рисунок 2.1 – Интерфейс для датчика соударений
У этих датчиков имеется серьезный недостаток: контакт не замыкается сразу. Появляется эффект дребезга контакта, который может быть неправильно интерпретирован центром управления. Решение этой проблемы заключается во введении в программу достаточно длительной задержки, перекрывающей интервал времени дребезга контакта, между двумя интервалами времени чтения этих входов. Такое решение используется в программах, имеющих узел реального времени.
Датчики наклона предназначены для использования на пересеченной местности, но не просто найти модель, указывающую наклон с большой точностью до двух градусов наклона и более.
Положение датчика очень важно во избежание получения ложной информации. Малейшее ускорение робота вызывает срабатывание датчиков. Необходимо установить несколько датчиков для проверки истинности полученной информации и дождаться остановки робота для прочтения их значения.
Интерфейсы датчиков наклона идентичны интерфейсам, предназначенным для датчиков соударений.
Оптические датчики
Оптические датчики включают в себя фоторезисторы, фототранзисторы, фотодиоды, пироэлектрические датчики и видеокамеры. Выбор того или иного типа зависит от таких параметров, как длина волны оптического спектра излучения или скорость считывания показаний датчика. Длиной волны определяется цвет источника света, который может меняться от ультрафиолетового до инфракрасного, проходя через видимую область спектра. На рисунке 2.2 показаны области известных источников света.
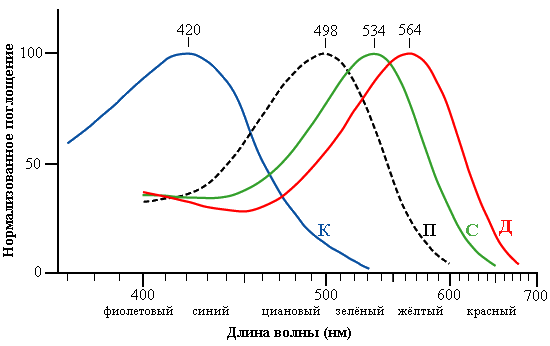
Рисунок 2.2 – Длины волн оптического спектра излучений
Время срабатывания представляет собой важный фактор времени расчета для подтверждения информации. Фотодиоды и фототранзисторы являются самыми быстрыми, а фоторезисторы и видеокамеры - более медленными.
Эти датчики могут оснащаться как простыми электронными интерфейсами подобно датчикам соударений, так и сложными интерфейсами, необходимыми, например, для видеокамеры. Данные, получаемые от датчика, могут быть аналоговыми или цифровыми в зависимости от выбранного интерфейса. Для улучшения чувствительности при конкретном применении может понадобиться дополнительный источник света. Например, кодированное ИК-сообщение информирует робот-пылесос о местонахождении разъема для зарядки батареи.
Фоторезистор представляет собой полупроводниковый резистор, сопротивление которого зависит от освещенности, при уменьшении которой его сопротивление увеличивается. Очень просто изготовить интерфейс для данного компонента с аналоговым входом для подключения платы управления. Достаточно всего одного резистора в паре с фоторезистором. При помощи резистора мы создаем делитель напряжения, выходное значение которого зависит от освещенности (рис. 2.3).

Рисунок 2.3 – Интерфейс для фоторезистора
Этот датчик очень чувствителен к видимому свету, соответственно, данная информация может быть очень полезна для управления роботом. Подобно человеку датчик должен быть способен различать градации света: темноту, затемненные зоны и изменения яркости света.
ИК-датчиками являются фототранзисторы или фотодиоды.
Фототранзистор и фотодиод обладают максимальным покрытием ИК-области спектра, но их также можно применять и в красной области спектра. Фотодиод имеет более быстрое время срабатывания, чем фототранзистор.
Фотодиоду отдают предпочтение, когда необходимо обнаружение кодированного сообщения, например, при приеме сигналов пультом дистанционного управления телевизора. Но для усиления принятого сигнала необходим интерфейс, и, соответственно, фотодиод не может подключаться непосредственно к плате управления.
Фототранзистор используется в качестве замены фоторезистора для обнаружения быстрых перепадов освещенности окружающего пространства. Как и фоторезистор, фототранзистор подключается непосредственно к плате управления при помощи простого интерфейса (рис. 2.4).
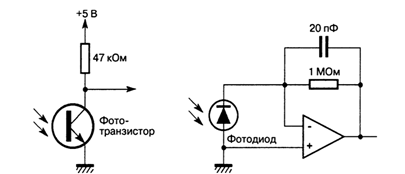
Рисунок 2.4 – Интерфейс для фототранзисторов и фотодиодов
Фототранзисторы часто используются совместно с излучателем фотонов – источником света, например светодиодом (французское обозначение - Del, английское обозначение -Led). Эти совместно работающие компоненты называются оптопарой и в зависимости от ориентации могут образовывать датчик отражения или оптокоммутатар. Схема включения неизменна для обоих типов датчиков (рис. 2.5).

Рисунок 2.5 – Интерфейс для датчика отражения и оптокоммутатора
Для сведения к минимуму влияния окружающего света на датчик используется ИК-модель светодиода. Светодиод настраивается на оптимальное значение светового излучения при помощи переменного резистора, которым регулируется количество излучаемых фотонов. Это позволяет избежать насыщения приемника, в результате которого приемник становится непригодным для использования. Сопротивление нагрузки фототранзистора зависит от модели. Оптимальное значение сопротивления подбирается опытным путем.
Датчик отражения используется для обнаружения градаций монохромного (черно-белого) цвета на плоской поверхности. Темная поверхность поглощает излученные фотоны, и транзистор остается в закрытом состоянии. Светлая поверхность отражает свет в направлении фототранзистора, в результате чего происходит его насыщение - транзистор переходит в другое, открытое, состояние.
Таким же образом возможно обнаружение и других цветов, например зеленого. Оптимальное расстояние обнаружения составляет порядка 5 мм. При изменении этого расстояния характеристики датчика заметно ухудшаются.








