 2020-01-14
2020-01-14 196
196Сначала формируется карта рабочей зоны робота, при этом внешняя среда дискретизируется, и каждому участку, содержащему препятствие, ставится в соответствие информация о типе этого препятствия. Также предполагается, что для определения проходимости участков среды используется дистантная сенсорная подсистема сканирования на основе лазерного дальномера, а определение пройденного пути осуществляется с помощью одометрической подсистемы с применением метода пассивного колеса. Построение карты происходит одновременно с исследованием внешней среды.
Пусть в начальный момент времени внешняя среда не исследована, а робот находится в центре свободного участка 0 (рисунок 3.1), который считается началом координат создаваемой карты.
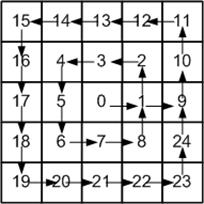
Рисунок 3.1 – Траектория движения робота при составлении карты
Участки с номерами 1-8 считаются потенциально проходимыми. Для уточнения их проходимости робот осуществляет последовательное сканирование данных участков. Сканирование начинается с участка номер 1. Если данный участок свободен, то выполняется перемещение в среде в направлении центра первого участка как показано на Рисунке 3.1. Причем величина перемещения равна максимальному из габаритных размеров участков, на которые дискретизируется среда. После этого считается, что робот переместился в центр следующего свободного участка. При этом координаты центра данного участка, рассчитываемые по формулам 3.1 и 3.2, наносятся на карту.
 ; (3.1)
; (3.1)
 . (3.2)
. (3.2)
Здесь  ,
,  – абсцисса и ордината центра предыдущего участка,
– абсцисса и ордината центра предыдущего участка,  – величина перемещения,
– величина перемещения,  – курсовой угол робота.
– курсовой угол робота.
В формуле (3.1) выбирается знак «+», если i -й участок расположен правее i -1 и знак «-», если левее. В формуле (3.2) знак «+» выбирается, если i -й участок расположен выше, чем i -1-й, и «-», если ниже. Также наряду с координатами центра каждому участку ставятся в соответствие индексы смещения по координатным осям X, Y относительно начального участка 0 (рисунок 3.1). Это делается для того, чтобы упорядочить хранение карты среды в памяти робота в соответствии с индексами участков. После того, как робот нанес информацию о первом участке на карту, он сканирует проходимость участков 2, 3,..., 8 двигаясь против часовой стрелки по периметру участка 0, как показано на Рисунке 3.1. Если какой-то из данных участков оказывается занятым, то робот определяет, находится ли на нем препятствие либо цель и вносит информацию о данном участке на карту. После обследования участков 1-8 робот расширяет зону исследований и переходит к сканированию участков 9-23 и т.д. Данный процесс продолжается до тех пор, пока во внешней среде не останется ни одного неисследованного участка. После этого в памяти робота формируется карта его рабочей зоны.
Исходя из этого, строим алгоритм составления карты местности (рис.3.2).
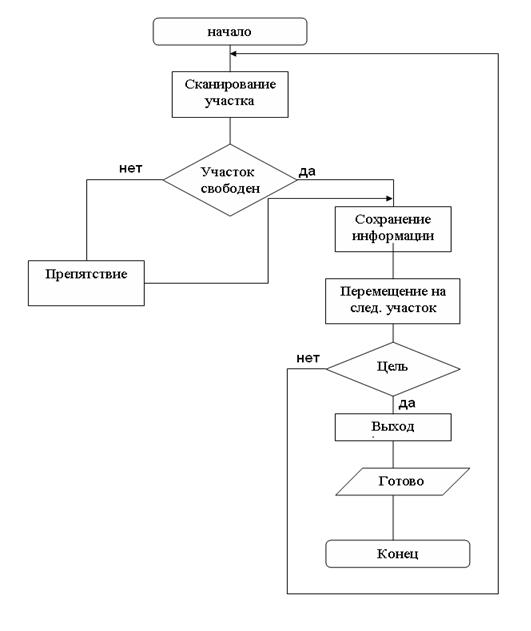
Рисунок 3.2 – Алгоритм составления карты местности
Зная смещение робота ( ,
,  ) относительно центра текущего участка можно определить индексы данного участка по следующим формулам:
) относительно центра текущего участка можно определить индексы данного участка по следующим формулам:
 ; (3.4)
; (3.4)
 . (3.5)
. (3.5)
После составления карты среды робот должен использовать ее в процессе перемещений к цели. Однако полученная карта не может быть абсолютно точной из-за погрешностей измерений. Поэтому робот после каждого перемещения должен выполнять уточнение карты, позиции на ней. Составление карты местности в виде алгоритма приведено в приложении С.








