 2020-01-14
2020-01-14 122
122
Для анализа динамических свойств виртуальной модели вентильного двигателя, кривые скорости  и момента
и момента  сняты на одном экране осциллографа (рис. 7.1).
сняты на одном экране осциллографа (рис. 7.1).
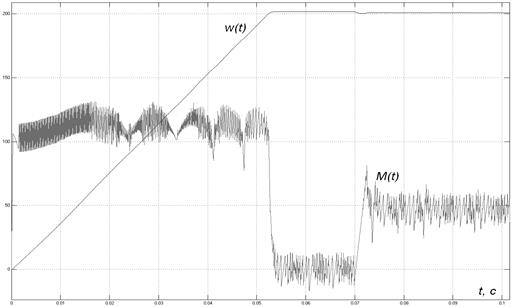
Рис. 7.1
Двигатель разгоняется при максимальном напряжении на номинальную скорость при отсутствии момента сопротивления, потом нагружается моментом, равным  .
.
Из осциллограмм момента и скорости двигателя видно, что момент двигателя не постоянен, и кроме пульсаций, обусловленных работой релейных регуляторов тока, имеет еще и пульсации, аналогичные пульсациям напряжения на выходе трехфазного мостового выпрямителя. Это объясняется тем, что при постоянном токе фазы I момент синхронного двигателя в функции поворота вала  изменяется по синусоиде.
изменяется по синусоиде.  где
где  - коэффициент пропорциональности между током и максимальным значением момента. При
- коэффициент пропорциональности между током и максимальным значением момента. При  , когда ось фазы совпадает с осью q, момент максимальный. Переключение фаз происходит при
, когда ось фазы совпадает с осью q, момент максимальный. Переключение фаз происходит при  и
и  . При этом
. При этом  . Отсюда и соответствующие этому провалы в кривой момента [1]. Такая симметричная относительно максимума форма момента говорит о том, что ДПР настроен правильно. В данной модели подстройка ДПР производится заданием начального угла
. Отсюда и соответствующие этому провалы в кривой момента [1]. Такая симметричная относительно максимума форма момента говорит о том, что ДПР настроен правильно. В данной модели подстройка ДПР производится заданием начального угла  , в реальном электроприводе – поворотом корпуса ДПР относительно корпуса двигателя.
, в реальном электроприводе – поворотом корпуса ДПР относительно корпуса двигателя.
При анализе влияния параметров двигателя на качество переходных процессов следует отметить, что при увеличении числа пар полюсов  уменьшается время разгона скорости до установившегося значения, т.к. увеличение приводит к увеличению электромагнитного момента и динамического ускорения.
уменьшается время разгона скорости до установившегося значения, т.к. увеличение приводит к увеличению электромагнитного момента и динамического ускорения.
На рис. 7.2. представлена механическая характеристика РЭП на фазовой плоскости, построенная с помощью графопостроителя.

Рис. 7.2
Она получается из временных зависимостей М(t) и w(t) путем исключения из них времени t. При разгоне ЭД годограф вектора электромеханической характеристики проходит последовательно через точки D, C и достигает точки А. Характеристика наглядно показывает динамику разгона двигателя. Также видно, что скорость устанавливается без перерегулирования на уровне расчетного значения.
Чтобы показать астатический характер РЭП, т.е. абсолютную жесткость электромеханической характеристики (неизменность скорости при изменении нагрузки), система была нагружена моментом сопротивления Мс=47, Нм через 0,07с после начала разгона (рис. 7.1). Из-за появления тока, обусловленного нагрузкой, в контуре тока возникает небольшое перерегулирование, что, тем не менее, не сказывается ощутимо на просадке скорости (рис.7.2). Годограф вектора переходит из точки А в точку В.
Очевидно, что точки А, В, С лежат на одном уровне, параллельном оси абсцисс и равном расчетному значению скорости.

Рис. 7.3
На рис. 7.3 и рис. 7.4 приведены диаграммы реверса вентильного двигателя.
Следует отметить высокое быстродействие регулируемого привода, зависящего от настройки контура скорости. Высокие динамические свойства вентильного двигателя по сравнению ДПТ с тиристорным управлением достигаются за счет использования безынерционного контура тока. Это достигается его линеаризацией, которая проведена с помощью параллельного включения в линейную часть контура ускоряющего элемента (рис. 6.5).

Рис. 7.4

Рис. 7.5
При рассмотрении вентильной машины во вращающейся системе координат  , можно заметить, что при постоянном потоке возбуждения электромагнитный момент двигателя однозначно определяется поперечной составляющей тока
, можно заметить, что при постоянном потоке возбуждения электромагнитный момент двигателя однозначно определяется поперечной составляющей тока  подвижной системы координат (рис. 7.5).
подвижной системы координат (рис. 7.5).
Продольная составляющая тока  не создает полезного момента, вызывает потребление реактивной энергии и с экономической точки зрения вызывает лишь дополнительные потери в виде нагрева двигателя [15]. Наличие реактивного тока связано с эквивалентной постоянной времени статорной цепи
не создает полезного момента, вызывает потребление реактивной энергии и с экономической точки зрения вызывает лишь дополнительные потери в виде нагрева двигателя [15]. Наличие реактивного тока связано с эквивалентной постоянной времени статорной цепи  и перекрестными связями между продольной и поперечной осями двигателя.
и перекрестными связями между продольной и поперечной осями двигателя.
В действительности она больше нуля всегда, что вызывает появление тока  . Устранения потерь добиваются включением в контур реактивного тока дополнительного регулятора тока [15].
. Устранения потерь добиваются включением в контур реактивного тока дополнительного регулятора тока [15].
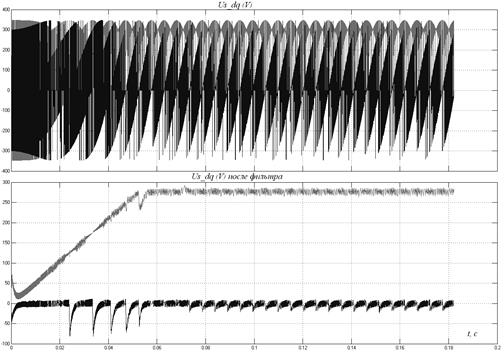
Рис. 7.6
Реактивный ток затрачивается на возбуждение машины (рис. 7.5), который быстро спадает при выходе двигателя на установившуюся скорость. Отметим еще раз, что при появлении нагрузки возникновение реактивного тока неизбежно.
На рис. 7.6 показаны также напряжения статора вентильного двигателя в координатах d,q,0.
На рис. 7.7 изображена диаграмма отработки привода с вентильным двигателем «малого» задания скорости, Uзс=0.01,В.
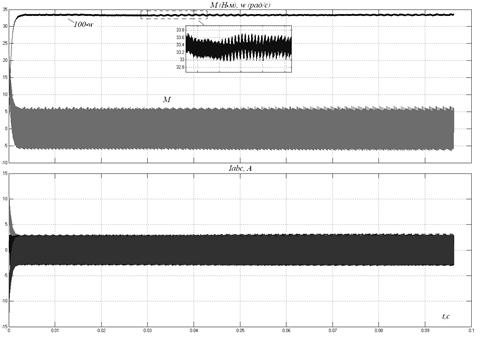
Рис. 7.7
Регулятор скорости не заходит в ограничение. Скорость ротора устанавливается без перерегулирования, ток не достигает своего максимального значения.
Наличие высших гармоник, наложенных на основные измеряемые координаты связано дискретными сигналами управления релейного регулятора тока.








