 2020-01-14
2020-01-14 184
184
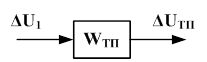
Схема системы автоматического управления подачей при копировании приведена на рисунке 2. В систему автоматического управления необходимо ввести элементы:

Рисунок 2 – Функциональная схема САУ
где: ЭУ – усилитель, Д – двигатель, Р – механический редуктор, ТП – тиристорный преобразователь, ПЛП – преобразователь линейных перемещений, ХВ – ходовой винт, ПР – процесс резания, УСС – упругая система станка, ТГ - тахогенератор.
Преобразователь линейного перемещения в цепи питания двигателя, вырабатывает сигнал пропорциональный силе резания. В результате этот сигнал поступает на вход сравнивающего устройства и сравнивается с входным заданным сигналом. В результате на вход электронного усилителя поступает сигнал ошибки, который вызывает изменение напряжения питания двигателя постоянного тока, а, следовательно, и скорость подачи стола.
РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ САУ
СТРУКТУРНАЯ СХЕМА САУ
Разработка структурной схемы САУ осуществляется на основе функциональной схемы системы (рисунок 2). В структурной схеме в отличие от функциональной должны быть определены все передаточные функции.
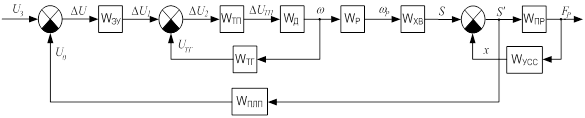
Рисунок 3.1 – Структурная схема САУ
ВЫВОД ТИПОВЫХ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЗВЕНЬЕВ СИСТЕМЫ
Электронный усилитель
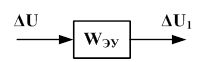
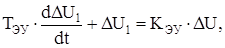
где: ТЭУ – постоянная времени электронного усилителя, с;
ΔU1 – выходное напряжение, В;
ΔU – входное напряжение, В;
КЭУ – коэффициент усиления.
Передаточная функция усилителя (апериодическое звено I порядка)
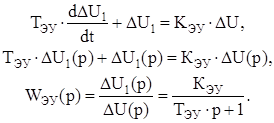
Согласно исходным данным (таблица 1) получим:
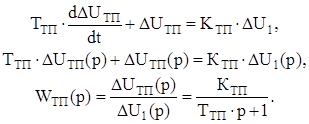
Тиристорный преобразователь

где: ТЭУ – постоянная времени электронного усилителя, с;
ΔUТП – выходное напряжение, В;
ΔU1 – входное напряжение, В;
КЭУ – коэффициент усиления.
Передаточная функция усилителя (апериодическое звено I порядка)
Согласно исходным данным (таблица 1) получим:
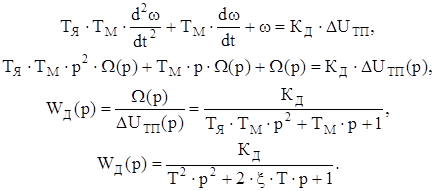
Двигатель (ДПТ)

где ТЯ – электромагнитная постоянная времени якоря, с;
ТМ – электромеханическая постоянная двигателя, с;
ω – угловая скорость, с-1;
KД – коэффициент передачи электродвигателя, 1/сВ;
ΔUТП – напряжение якоря, В.
Передаточная функция электродвигателя постоянного тока (колебательное звено)
Согласно исходным данным (таблица 1) получим:

Редуктор
где Кр – коэффициент передачи;
ω – входная угловая скорость, рад/с;
ωР – выходная угловая скорость, рад/с;
Согласно исходным данным (таблица 1) получим:
Ходовой винт
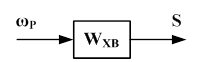

где t – шаг винта, мм;
ωР – входная угловая скорость, рад/с;
S – выходное линейное перемещение, мм.
Согласно исходным данным (таблица 1) получим:
Процесс резания
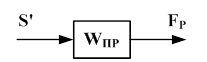
Передаточная функция процесса резания (апериодическое звено I порядка):
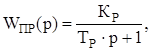
где Кр – коэффициент резания
Тр – постоянная времени стружкообразования, с.
Сила резания при равномерном фрезеровании цилиндрической фрезой:


При полном фрезеровании торцовой фрезой:
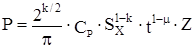 ;
;  ,
,
 где: СР – постоянный коэффициент, зависящий от свойств обрабатываемого материала;
где: СР – постоянный коэффициент, зависящий от свойств обрабатываемого материала;
t – глубина резания, мм;
S – подача, мм/об;
V – скорость резания, мм/сек.
Z – число зубьев
Подставляя значения получим:
 ;
;
 ;
;
 ;
;


Согласно исходным данным (таблица 1) получим:









