2020-01-14
2020-01-14 251
251
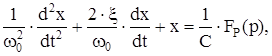
где ω0 – собственная частота колебаний, с-1;
ξ – коэффициент затухания колебаний;
х – деформация упругой системы станка, мм;
С – жесткость упругой системы станка, Н/мм;
FР – входной силовой параметр, Н.
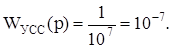
Передаточная функция эквивалентной упругой системы станка (колебательное звено):

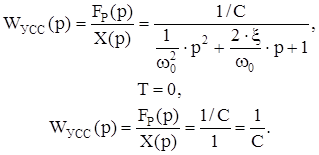
Согласно исходным данным (таблица 1) получим:
Тахогенератор
Т.к. значение КТГ равно нулю, то передаточная функция тахогенератора будет равна нулю, таким образом можно убрать блок ТГ и обратную связь, в которой он находится.
 Рисунок 3.2 – Структурная схема САУ
Рисунок 3.2 – Структурная схема САУ
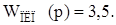
Преобразователь линейного перемещения

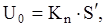
где U – выходное напряжение преобразователя, В;
Кn – коэффициент передачи, В·А;
S' – входное перемещение, мм.
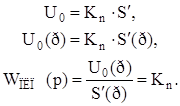
Согласно исходным данным (таблица 1) получим:
ПРЕОБРАЗОВАНИЕ СТРУКТУРНОЙ СХЕМЫ
автоматическое управление мехатронный модуль
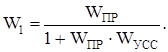
Для упрощения структурной схемы перенесём узел через звено WПР, при этом в обратную связь введём новое звено 1/WПР. Заменим контур 1 типовым звеном W1. Введём новый блок W1.
 Рисунок 3.3 – Преобразование структурной схемы
Рисунок 3.3 – Преобразование структурной схемы


Таким образом, получим следующий вид структурной схемы:

Рисунок 3.4 – Преобразованная структурная схема