 2020-01-14
2020-01-14 201
201Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия [1, 158 стр.].
При исследовании и проектировании САУ часто используют ЛАХ и ЛФХ разомкнутых систем. Это объясняется тем, что разомкнутые САУ более просто исследовать экспериментально, чем замкнутые. В то же время по ним можно получить исчерпывающую информацию о поведении данной САУ в замкнутом состоянии.
Если система неустойчива, то достаточно любого толчка, чтобы в ней начался расходящийся процесс ухода из исходного установившегося состояния.
Принято использовать следующие типовые (стандартные) показатели качества переходного процесса, отражённые на типичном графике переходного процесса в следящей системе.
– tp – время переходного процесса: tp – время окончательного попадания в 5% окрестность установившегося значения.
– eуст – установившаяся ошибка (статическая точность):
eуст = e(¥) = 1 – yуст.
Если eуст=0, то система астатическая.
– s (%) – относительное перерегулирование:
– n – число колебаний за время переходного процесса  .
.
Это – стандартные (типовые) показатели качества, они понятны для заказчиков. Оказывается, что все четыре показателя теснейшим образом связаны с запасами устойчивости по амплитуде и по фазе. Поэтому, обеспечение стандартных показателей качества обеспечивает необходимую устойчивость.
Исследуем заданный объект на устойчивость, найдём передаточную функцию разомкнутой системы.
Набираем передаточную функцию на ЭВМ в пакете MatLab 7.1, при помощи команды step(W), получаем график переходного процесса (рисунок 4.1).
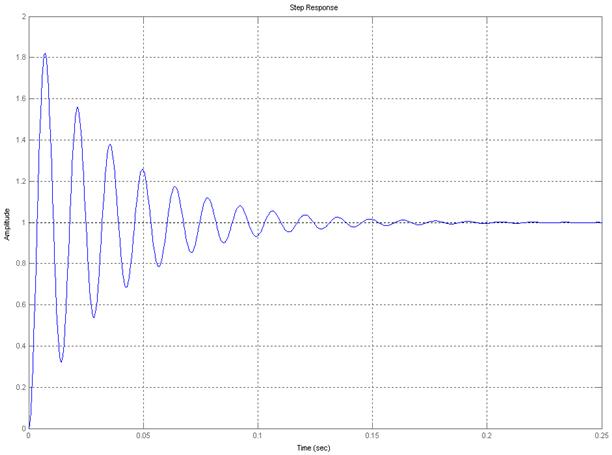
Рисунок 4.1 – Переходный процесс системы
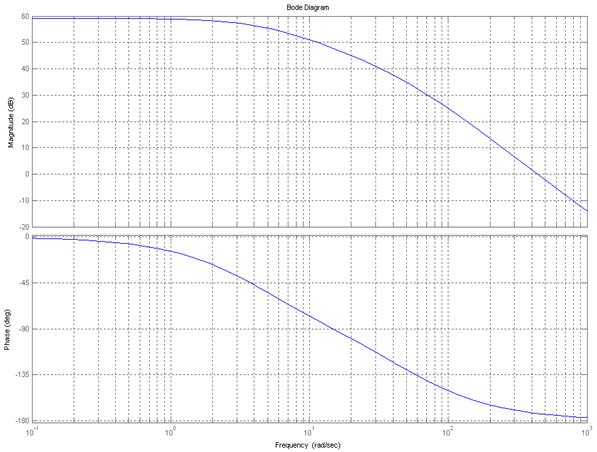
Рисунок 4.2 – ЛАХ и ЛФХ системы
ЭВМ выдает график переходного процесса, из графика видно, что система при исходных данных устойчива, но не удовлетворяет требуемым показателям качества (M ≤ 3).
Передаточная функция ошибки по управляющему воздействию:

Коэффициенты ошибок найдем по передаточной функции ошибки управления путем деления числителя передаточной функции на знаменатель, т.о. получили:
С0 = 0,001104;
С1 = 0,000276;
С2 = 0,000005.
Для того чтобы добиться заданных показателей качества (tp = 2 с; коэффициент перерегулирования  ) вводим корректирующее устройство.
) вводим корректирующее устройство.
Применим последовательное корректирующее устройство. Передаточная функция разомкнутой скорректированной системы равна исходной, умноженной на передаточную функцию корректора:
[WP(p)]Ж = WP(p)Н · WP(p)КУ.
Корректирующее устройство включено последовательно в контуре системы в любом месте. Для исследования идеально подходят ЛАЧХ (так как они складываются при последовательном соединении). Задаются желаемые ЛАХ и ЛФХ и тогда:
LЖ(w) = LН(w) + LКУ(w);
φЖ(w) = φН(w) + φКУ(w);








