 2020-01-14
2020-01-14 201
201КУРСОВОЙ ПРОЕКТ
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА
Содержание
Исходные данные
1 Структурный анализ механизма
2 Кинематический анализ механизма
2.1 Построение планов механизма
2.2 Построение планов скоростей механизма
2.3 Построение планов ускорений механизма
3 Кинетостатический анализ механизма
3.1 Определение исходных данных для кинетостатического анализа
3.2 Определение реакций кинематических пар в структурной группе (звенья 2-3)
3.3 Силовой расчет ведущего звена
4 Кинематическое исследование зубчатого механизма
Список использованной литературы
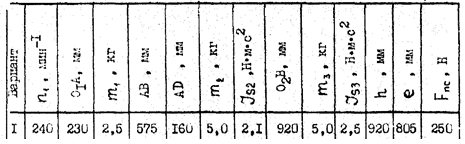
Исходные данные
Схема 4

Выполнить: структурный, кинематический и кинетостатический анализ для положения кривошипа при φ = 2250.
Структурный анализ механизма
Представим механизм в виде совокупности начального механизма и структурных групп.
Начальным механизмом называют механизм, состоящий из двух звеньев: 1, 0 (одно из них неподвижное — стойка), которые образуют одноподвижную пару (вращательную или поступательную). Структурная группа, или группа Ассура — кинематическая цепь, которая состоит из подвижных звеньев, соединенных между собой низшими одноподвижными кинематическими парами, и имеет число подвижностей группы (на плоскости), равное нулю.
Последовательность анализа:
· Выделяем звенья, образующие начальный механизм
· Определяем состав и вид групп Ассура, анализируя оставшиеся звенья, начиная со звеньев, наиболее удаленных от начального механизма.
Результаты структурного анализа представлены в табл. 1,2
Таблица 1
| Определение степени подвижности механизма -W | ||||||||||||||||||
|
| Обозначения КП | Звенья КП | Относ. движ. | Подвижность в КП | ||||||||||||||
| O1 | 4-1 | вращ | 1 | |||||||||||||||
| A | 1-2 | вращ | 1 | |||||||||||||||
| B | 2-3 | вращ | 1 | |||||||||||||||
| O2 | 3-4 | вращ | 1 | |||||||||||||||
| Вид абсолютного движения звеньев механизма (наименование звеньев) | Плоское (шатуны) | 2 |
| |||||||||||||||
| Вращательное (кривошипы, коромысла) | 1 | 3 | ||||||||||||||||
| Поступательное (ползуны) |
| |||||||||||||||||
| Траектории центров подвижных шарниров | Прямая |
|
|
|
| |||||||||||||
| Окружность | A | B |
|
| ||||||||||||||
| Сложная кривая |
|
|
|
| ||||||||||||||
| Число звеньев механизма | Общее (включая стойку) | k=4 | ||||||||||||||||
| совершающих движение | n=3 | |||||||||||||||||
| Число кинематических пар механизма | вращательных | p5в=4 | Всего 4 пятого класса p5=4 | |||||||||||||||
| поступательных | p5п=0 | |||||||||||||||||
| Число подвижностей механизма | W=3∙n-2∙p5=3∙3-2∙4=9-8=1 | |||||||||||||||||
Вывод – число подвижностей механизма W=1. Это означает, что механизм имеет только одно начальное звено – кривошип 1. Также это означает, что механизм имеет только одну степень свободы в движении относительно стойки и достаточно задать только одну обобщенную координату движения (например, угол поворота кривошипа относительно исходного положения), чтобы определить положение всех звеньев механизма относительно стойки в данный момент времени.
Таблица 2
| Разбиение на структурные группы и определение их класса и порядка | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

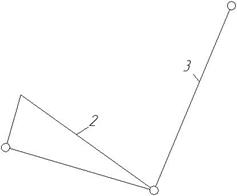
Заданный механизм состоит из ведущего звена 1 со стойкой 4 и двухповодковой группы (звенья 2 - 3). Звено 1 вращается, совершая полный оборот, и называется кривошипом. Звено 3 совершает вращательное движение с неполным оборотом и называется коромыслом. Звено 2 совершает сложное движение и образует кинематические пары с кривошипом 1 и коромыслом 3. Такое звено называется шатуном. Все кинематические пары вращательные V класса.
Таким образом, заданный механизм является плоским с одной степенью свободы и называется кривошипно-коромысловым.
Схему такого механизма можно использовать для резки пруткового материала.








