 2020-01-14
2020-01-14 224
224
Момент двигателя расходуется на работу по пластической деформации, на ускорение самого двигателя, валков и прокатываемой полосы, а также на преодоление аэродинамических потерь и потерь трения. Поэтому, хотя момент двигателя при постоянстве потока возбуждения характеризуется током якоря, этот ток далеко не однозначно определяет момент, затрачиваемый на прокатку.
Кроме того, при работе привода через шестеренную клеть, когда, например, оба валка четырехвалкового стана имеют привод от одного двигателя, распределение моментов между валками может существенно отличаться. Причин такого отличия много. Основным из них является различие диаметров рабочих валков и коэффициентов трения о полосу верхнего и нижнего рабочих валков.
Тензорезисторные измерители крутящего момента
При передаче крутящего момента круглым валом траектории главных деформаций (растяжение и сжатие) направлены под углом 45° к оси вала (рис. 8, а, б). Поэтому для измерения деформации кручения вала, а следовательно, и крутящего момента тензорезисторы наклеиваются на поверхность вала, как показано на рис. 8, в.
Четыре тензорезистора моста являются активными по отношению к измеряемому напряжению. Направление деформации зависит от направления действия скручивающего момента. Если момент приложен в направлении против часовой стрелки, как показано на рис. 8, а, сопротивления R1 и RЗ увеличиваются, а R2 и R4 уменьшаются, вызывая дисбаланс моста. Если момент действует в направлении по часовой стрелке, как показано на рис. 8, б, сопротивления R1, RЗ уменьшаются, а R
2и R4 увеличиваются, обусловливая дисбаланс моста в другую сторону.
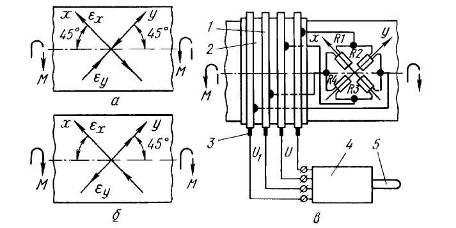
Рис. 8. Тензорезисторные измерители крутящего момента
Питание тензомоста напряжением U1 осуществляется через контактные кольца 1, закрепленные через изолирующие втулки 2 па вращающемся валу. Токосъемниками в данном случае могут быть графитовые щетки 3 или ртутные контакты. Сигнал дисбаланса моста U подается на теизоусилитель 4 и далее на устройство индикации или регистрации 5. Работа измерительных устройств, сигналы с которых передаются через трущиеся контакты, дает частые сбои из-за потери этого контакта. Кроме того, трущиеся контакты являются источником т. ЭДС, появление которой обусловливает дополнительную погрешность. Для ликвидации этой погрешности применяют различные бесконтактные системы питания и передачи информации с вращающегося вала на «наземную» аппаратуру.
Погрешность измерителей с помощью тензорезисторного моста не превосходит 1% от полной шкалы.






