 2020-04-20
2020-04-20 106
106
Моделирование прямого пуска спроектированного двигателя выполняется на холостом ходу с последующей нагрузкой после выхода на установившийся режим (через 5с) номинальным моментом (Mном=119,702 Н·м).
Моделирование выполняется в среде ПМК МИК-АЛ с учетом вышеуказанных замечаний без учета эффекта вытеснения тока с постоянными параметрами схемы замещения машины в двух вариантах:
– для параметров номинального режима;
– для параметров пускового режима.
Текст программы в ПМК МИК-АЛ для номинального режима:
$ВВОД
$УРАВН(Т)
{* Параметры НОМИНАЛЬНОГО режима *}
u:=537.4; P:=1; Rs:=0.253; Rrw:=0.191; Wk:=0;
Lm:=0.1223; Ls:=0.12507; Lr:=0.12588; J:=1.5; Mc:=0;
{* Питающие напряжения *}
Usa=N#sin_t(u:ПАР=1,314.15926,0.0);
Usb=N#sin_t(u:ПАР=1,314.15926,4.1888);
Usc=N#sin_t(u:ПАР=1,314.15926,2.0944);
Usal1=(-0.4082483)*(Usb+Usc)+0.8164967*Usa;
Usbet1=0.7071068*(Usb-Usc);
{*Преоразование в произвольную систему координат*}
FI'=P*Wk;
Usu=Usal1*N#cos(FI)+Usbet1*N#sin(FI);
Usv=-Usal1*N#sin(FI)+Usbet1*N#cos(FI);
{* Потокосцепления статора и ротора *}
Fsu'=Usu-Isu*Rs+P*Wk*Fsv;
Fsv'=Usv-Isv*Rs-P*Wk*Fsu;
Fru'=0-Iru*Rrw+Frv*P*(Wk-W);
Frv'=0-Irv*Rrw-Fru*P*(Wk-W);
{* Токи статора и ротора *}
{* СЛАУ *}
СЛАУ: Isu,Iru;
Ls*Isu+Lm*Iru=Fsu;
Lr*Iru+Lm*Isu=Fru;
СЛАУ: Isv,Irv;
Ls*Isv+Lm*Irv=Fsv;
Lr*Irv+Lm*Isv=Frv;
{* Электромагнитный момент и скорость *}
M=P*(Fsu*Isv-Fsv*Isu);
W'=(M-Mc)/J;
IstA=Isu/1.73;
КОНЕЦ
* Задание на эксперимент *
ИНТ RKT4
ШАГ ИНТ=0.001
ШАГ ВЫВ=0.006
КОН ВР=5
ВЫВОД Isu,Isv,IstA,Iru,Irv,Fsu,Fsv,W,M
ДИСПЛ W,M,Isu,Iru
$КОН
$СТОП
Текст программы в ПМК МИК-АЛ для пускового режима:
$ВВОД
$УРАВН(Т)
{* Параметры ПУСКОВОГО режима *}
u:=537.4; P:=1; Rs:=0.253; Rrw:=0.254; Wk:=0;
Lm:=0.208; Ls:=0.212; Lr:=0.21258; J:=1.5; Mc:=0;
{* Питающие напряжения *}
Usa=N#sin_t(u:ПАР=1,314.15926,0.0);
Usb=N#sin_t(u:ПАР=1,314.15926,4.1888);
Usc=N#sin_t(u:ПАР=1,314.15926,2.0944);
Usal1=(-0.4082483)*(Usb+Usc)+0.8164967*Usa;
Usbet1=0.7071068*(Usb-Usc);
{*Преоразование в произвольную систему координат*}
FI'=P*Wk;
Usu=Usal1*N#cos(FI)+Usbet1*N#sin(FI);
Usv=-Usal1*N#sin(FI)+Usbet1*N#cos(FI);
{* Потокосцепления статора и ротора *}
Fsu'=Usu-Isu*Rs+P*Wk*Fsv;
Fsv'=Usv-Isv*Rs-P*Wk*Fsu;
Fru'=0-Iru*Rrw+Frv*P*(Wk-W);
Frv'=0-Irv*Rrw-Fru*P*(Wk-W);
{* Токи статора и ротора *}
{* СЛАУ *}
СЛАУ: Isu,Iru;
Ls*Isu+Lm*Iru=Fsu;
Lr*Iru+Lm*Isu=Fru;
СЛАУ: Isv,Irv;
Ls*Isv+Lm*Irv=Fsv;
Lr*Irv+Lm*Isv=Frv;
{* Электромагнитный момент и скорость *}
M=P*(Fsu*Isv-Fsv*Isu);
W'=(M-Mc)/J;
IstA=Isu/1.73;
КОНЕЦ
*Задание на эксперимент*
ИНТ RKT4
ШАГ ИНТ=0.001
ШАГ ВЫВ=0.006
КОН ВР=5
ВЫВОД Isu,Isv,IstA,Iru,Irv,Fsu,Fsv,W,M
ДИСПЛ W,M,Isu,Iru
$КОН
$СТОП
Результаты моделирования пускового и номинального режимов в среде ПМК МИК-АЛ представлены на рис. 3, 4, 5, 6.
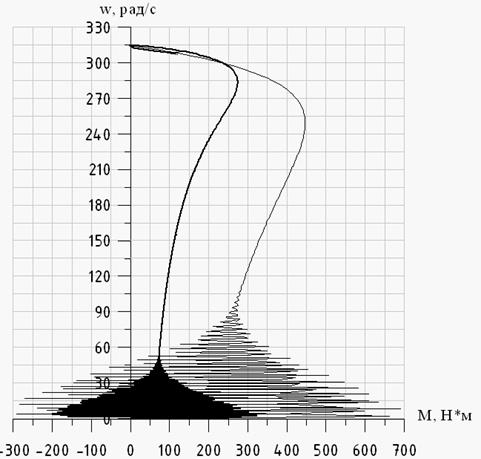
Рис. 3 - Динамическая механическая характеристика  : ––––– для номинального режима; – – – для пускового режима.
: ––––– для номинального режима; – – – для пускового режима.
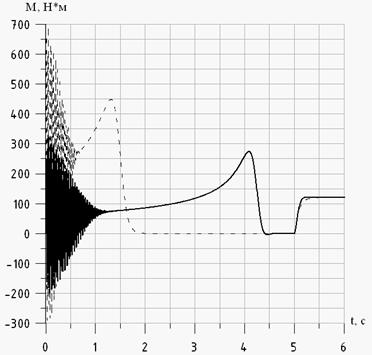
Рис. 4 - Зависимость электромагнитного момента от времени: ––––– для номинального режима; – – – для пускового режима
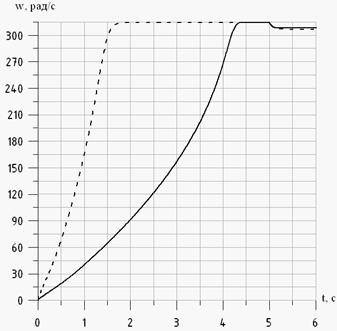
Рис. 5 - Зависимость угловой частоты вращения ротора от времени: ––––– для номинального режима; – – – для пускового режима
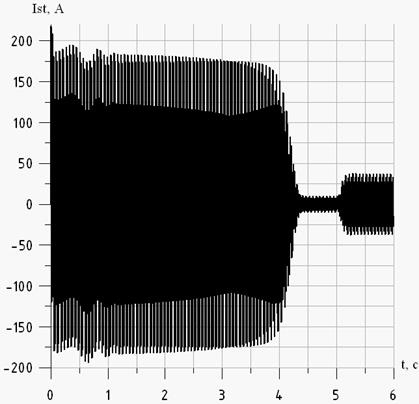
Рис. 6 - Зависимость тока фазы А статора от времени для номинального режима








