 2020-04-07
2020-04-07 523
523Основной задачей системы стабилизации крена при телеуправлении и самонаведении осесимметричных ЛА является сохранение угла крена неизменным и равным нулю.
Для ослабления влияния перекрестных связей между каналами крена, тангажа и рыскания контур стабилизации крена должен обладать максимальным быстродействием и иметь минимальную величину перерегулирования.
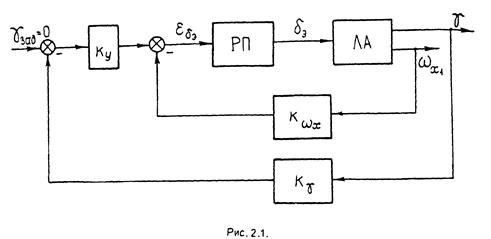
В наибольшей степени этим требованиям удовлетворяет контур стабилизации угла крена со свободным и дифференцирующим гироскопами (рис.2.1).
На этой схеме:
kwx -коэффициент усиления дифференцирующего гироскопа, измеряющего угловую скорость крена;
kg - коэффициент усиления свободного гироскопа, измеряющего угол крена;
РП - рулевой привод.
Введение двух обратных связей позволяет повысить коэффициент усиления системы, увеличить запасы устойчивости и уменьшить время переходного процесса системы стабилизации угла крена.
Если инерционность рулевого привода учитывать с помощью апериодического звена первого порядка с передаточной функцией
то уравнения, учитывающие динамику системы стабилизации угла крена на основе схемы, приведенной на рис.2.1, можно записать в виде:
 (2.11)
(2.11)
Однако сформированная система стабилизации угла крена является статической и ей присущи все недостатки подобного рода систем.
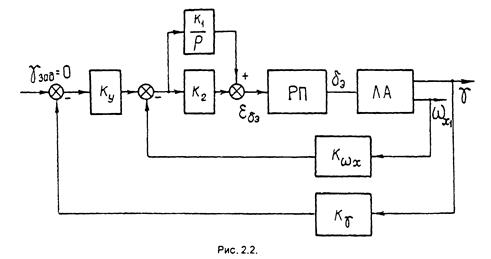
В тех случаях, когда требуется повысить точность стабилизации угла крена путем устранения установившейся ошибки по углу g, применяются астатические системы стабилизации. Система стабилизации в этом случае формируется за счет применения операционных усилителей (рис.2.2) или дополнительного включения в обратную связь интегрирующего гироскопа. Но данные системы являются более сложными и менее надежными.








