 2020-04-07
2020-04-07 102
102Федеральное агентство по рыболовству
Федеральное государственное бюджетное образовательное
Учреждение высшего образования
«Астраханский государственный технический
Университет»
Система менеджмента качества в области образования, воспитания, науки и инноваций сертифицирована DQS по международному стандарту ISO 9001:2015
Институт Информационных технологий и коммуникация
Кафедра Автоматика и управление
АВТОМАТИЗАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Методические указания для выполнения лабораторных работ для обучающихся по направлению 15.03.04 «Автоматизация технологических процессов и производств» профиль подготовки «Автоматизация технологических процессов и производств в нефтяной и газовой промышленности»
Астрахань - 2017 г.
Составитель: к.т.н., доц. каф. «Автоматика и управление» В.И. Кантемиров
Методические указания по выполнению лабораторных работ по дисциплине «Автоматизация технологических процессов» утверждены на заседании кафедры «Автоматика и управление» «29» августа 2017 г., протокол № 7а
© Астраханский государственный технический университет
Содержание
Лабораторная работа №1. Расчет и исследование одноконтурной АСР
Лабораторная работа №2. Расчет и исследование комбинированной АСР.
Лабораторная работа №3. Расчет и исследование каскадной АСР
Лабораторная работа №1
Расчет и исследование одноконтурной АСР
1. Цель работы:
1.1. Изучение основных алгоритмов функционирования регуляторов и их динамических характеристик.
1.2. Освоение двух распространенных методов приближённого расчёта параметров настройки регуляторов.
1.3. Исследование качества переходных процессов в одноконтурных системах с различными регуляторами при оптимальных настройках.
Общие сведения.
Автоматическая система регулирования должна быть не только устойчивой, но в обеспечивающей необходимое качество процессов регулирования. В условиях заданных динамических характеристик объектов требуемое качество процессов регулирования можно подучить лишь за счёт оптимальной настройки регулятора.
Под оптимальными настройками регулятора обычно понижаются такие значения его настроечных параметров, которые обеспечивают в системе требуемое затухание переходных процессов (требуемый запас устойчивости) при минимальных значениях других показателей качества (динамических и статических отклонений, длительности переходных процессов, интегральных критериев качества).
В настоящей работе предполагается исследование качества регулирования в системах, состоящих из одного и того же объекта регулирования и различных по алгоритму функционирования регуляторов.
В качестве регуляторов приняты:
- пропорциональный (П-регулятор) с уравнением  , где
, где  - перемещение регулирующего органа (условно), ε - ошибка регулирования, К р - коэффициент передачи регулятора, являющийся настроечным параметром;
- перемещение регулирующего органа (условно), ε - ошибка регулирования, К р - коэффициент передачи регулятора, являющийся настроечным параметром;
-пропорционально- интегральный (ПИ-регулятор) с уравнением  , где К р - коэффициент передачи и Ти - время изодрома, являются его настроечными параметрами;
, где К р - коэффициент передачи и Ти - время изодрома, являются его настроечными параметрами;
-пропорционально-интегрально-дифференциальный регулятор (ПИД -регулятор) с  , тде_Кр, Ти,Тд - время предварения являются настроечными параметрами регулятора.
, тде_Кр, Ти,Тд - время предварения являются настроечными параметрами регулятора.
а)определение оптимальных настроек регуляторов предлагается осуществить на основе приближённого метода расчета и соответствии с динамическими параметрами объекта, определяемыми по переходным функциям или кривым разгона. Этот метод часто называют методом ВТИ (всесоюзный теплотехнический институт).
В результате расчётно-экспериментальных исследования были установлены закономерности изменения настроечных параметров регуляторов (Кр, Ти, Тд) в зависимости от параметров объекта: скорости разгона- ε, степени самовыравнивания -ρ, запаздывания-τ, определяемых по переходной функция или кривой разгона объекта.
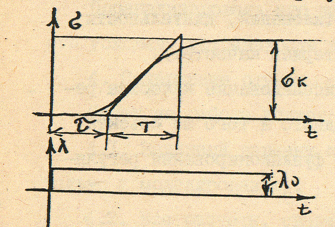
Для оценки динамических свойств объектов их переходные функции или кривые разгона обрабатываются так как показано на рис.1, после чего определяется произведение  и в зависимости от его величины находятся настройки регуляторов в соответствии с таблицей 1.
и в зависимости от его величины находятся настройки регуляторов в соответствии с таблицей 1.
|

|
Рисунок 1 – Переходная функция объекта и ее обработка
Таблица 1
| Регулятор | ερτ=0÷0,2 | 0,2<ερτ<1,5 | ||||
| Кр | Ти | Тд | Кр | Ти | Тд | |
| П | 
| - | - | 
| - | - |
| ПИ | 
| 3,3τ | - | 
| 
| - |
| ПИД | 
| 2,5τ | 0,5 Ти | 
| 
| 0,5 Ти |
б) экспериментальный метод определения параметров настройки регулятора (метод Циглера-Никольса) заключается в создании в замкнутой АСР незатухающих колебаний координаты y(t), нахождении их частоты ωкр и вычисления по приближенным формулам значений С0, С1, С2 или Кр, Ти, Тд. Полученные настройки регулятора в большинстве случаев обеспечивают приемлемое (удовлетворительное) качество регулирования выходной координаты y(t) ТОУ.
Для создания незатухающих колебаний y(t) линейный ПИД-регулятор преобразуют в П-регулятор (для этого полагают Ти=∞, Тд=0 ) и, постепенно увеличивается коэффициент усиления С0 или Кр, наблюдают за формой переходного процесса y(t) и замкнутой АСР. При некотором значении  переходной процесс становится почти незатухающим с периодом колебаний Ткр и частотой ωкр=2π0/ Ткр.
переходной процесс становится почти незатухающим с периодом колебаний Ткр и частотой ωкр=2π0/ Ткр.
По известным из эксперимента величинам  и ωкр вычисляются «хорошие» параметры настройки:
и ωкр вычисляются «хорошие» параметры настройки:
П-регулятора: 
ПИ-регулятора: 
ПИД-регулятора: 
Справедливость «хороших» настроек регулятора должна быть проверена путем получения переходных процессов в АСР и оценивания их качества по тем или иным критериям. Если качество функционирования АСР неудовлетворительное, то необходимо коррекция найденных значений параметров настройки регулятора.
Задание на работу и порядок выполнения.
3.1. Смоделировать одноконтурную систему, состоящую из выбранного регулятора и объекта с передаточной функцией и моделью, соответствующими соединению звеньев.
Система должна "собираться" последовательно для П-, ПИ-, ПИД-регуляторов.
Собранная система должна содержать 2 генератора и 2 сумматора (один из них с отрицательной обратной связью) для получения переходных процессов по управляющему (задающему) и возмущающему воздействиям.
3.2. Двумя способами, указанными выше, определить оптимальные настройки всех регуляторов. Для метода Циглера-Никольса использовать передаточную функцию объекта, определенную по кривой разгона и представленную в виде сочетания звена чистого запаздывания и апериодического звена второго порядка.
3.3. Реализовать одноконтурные системы с каждым из регуляторов и получить переходные функции замкнутых систем по каналам управляющего и возмущающего воздействий.
3.4. Оценить качество полученных переходных процессов. Сравнить экспериментально полученные статические ошибки с рассчитанными аналитически.
Содержание отчёта.
Отчёт по работе должен содержать:
4.1. Структурную схему системы (применительно к моделированию).
4.2. Переходную функцию объекта и её обработку в целях определения настроек регуляторов.
4.3. Расчёты настроек регуляторов.
4.4. Таблицы и графики всех переходных процессов.
4.5. Анализ качества полученных переходных процессов и выводы относительно использованных регуляторов.








