 2020-04-07
2020-04-07 130
130Расчет и исследование комбинированной АСР.
Цель работы:
· изучить принципы построения и расчета комбинированных систем регулирования;
· исследовать динамические характеристики объекта для построения комбинированной АСР;
· рассчитать настройки регуляторов и исследовать качество комбинированной АСР при данный настройках.
Теория.
При автоматизации ТОУ возможны случаи, когда одноконтурные АСР не обеспечивают удовлетворительного качества регулирования ни при каких настройках регулятора.
Одной из причин низкого качества регулирования является воздействие на ТОУ существенных возмущений. Если имеется возможность автоматического измерения наиболее «сильного» возмущающего воздействия на ТОУ, то применяются комбинированные АСР, в которой действие контролированного возмущения компенсируется специальным устройством с помощью регулятора, находящегося в контуре обратной связи. Таким образом регулирующее воздействие формируется на основании двух принципов регулирования: по отклонению регулируемой величины от заданного значения и по возмущению. Компенсация возмущения осуществляется путем введения дополнительного управляющего воздействия либо на вход канала регулирования (рис. 1), либо непосредственно на вход регулятора (рис. 2).
Основой расчета комбинированных систем регулирования является принцип инвариантности. Применительно к данным системам этот принцип можно сформулировать следующим образом: отклонение выходной координаты ТОУ под действием возмущения должно тождественно равно нулю:
D Y(t, x) = Y(t) – Y0(t) (1)
Переходя к изображениям по Лапласу:
Y(s) º 0 (2)
Для случая, когда сигнал от компенсатора подается на вход объекта (рис. 1,а), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой и замкнутой системы (рис. 1,б). Передаточные функции которых соответственно равны:
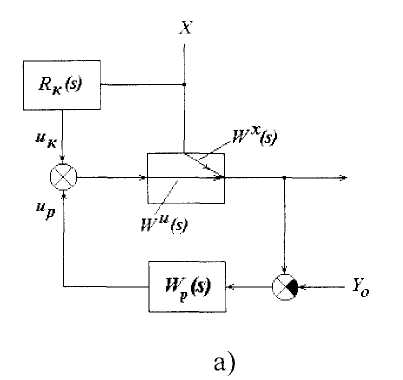

Рис.1. Структурные схемы комбинированной АСР при подаче компенсирующего сигнала на вход объекта:
а) – исходная, б) – преобразованная.
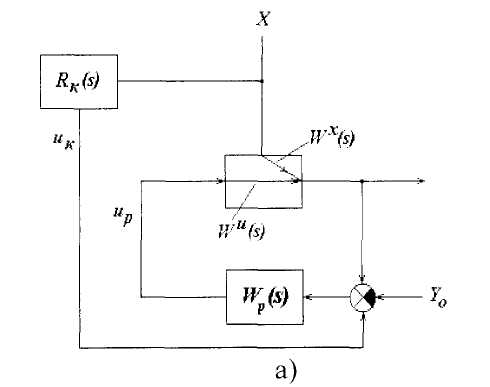
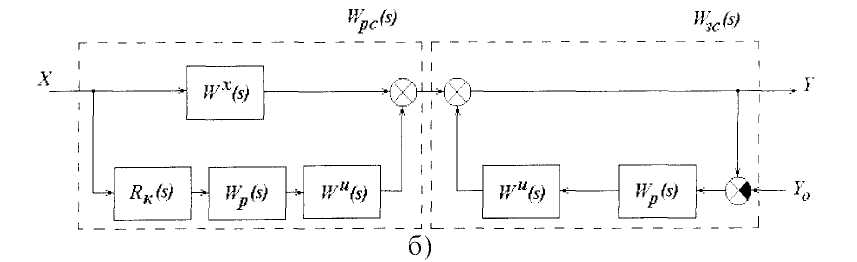
Рис.2. Структурные схемы комбинированной АСР при подаче компенсирующего сигнала на вход регулятора:
а) – исходная, б) – преобразованная.
Wрс(s)=W(s)+Rк(s)×Wu(s) (3)
Wзс(s) = 1/ (1 - Wp(s)×Wu(s)) (4)
При этом передаточная функция комбинированной системы равна
Wкс(s) = Wрс(s)×Wзс(s) (5)
Y(s) = Wкс(s)×X(s) (6)
Подстановка выражений (5) и (6) в условие инвариантности (2) приводит к следующим соотношениям:
X(s)×Wрс(s)×Wзс(s) = 0
Если X(s)¹0 и Wзс(s) ¹0, то получаем условие инвариантности в виде:
Wx(s)+Rк(s)×Wu(s) = 0 (7)
Откуда
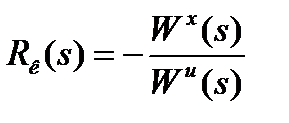 (8)
(8)
При использовании комбинированной АСР второго типа аналогичный вывод приводит к соотношению вида:
 (9)
(9)
Знак минус в формулах (7) и (9) означает, что компенсирующий сигнал должен иметь знак, противоположный знаку возмущения.
Одной из основных трудностей построения инвариантных систем регулирования является проблема из физической реализуемости. Можно указать два условия физической реализуемости компенсаторов:
1) Компенсатор не должен содержать звена с отрицательным чистым запаздыванием, т.е. время чистого запаздывания по каналу регулирования tu должно быть меньше, чем время запаздывания по каналу возмущения tx. Тогда, с учетом (8), получим
tк = tх - tu >0
2) Компенсатор не должен содержать идеальные дифференцирующие звенья, т.е. в передаточной функции компенсатора степень полинома в числитете mк не должна превышать степени полинома в знаменателе nк.
При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы в определенном диапазоне частот. При этом реальный компенсатор зачастую выбирается из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитываются из условия близости частотных характеристик идеального Rкид (jw) и реального Rк р(jw) компенсаторов в заданном диапазоне частот, т.е.
Rкид (jw)» Rк р(jw), w*<w<w *
При такой постановке задачи условие приближенной инвариантности имеет вид:
|Y(jw)| = 0, w*<w<w * (10)
где
|Y(jw)| = |X(jw)|×|Wкс(jw)|2
Диапазон частот [ w* , w* ] зависит от частотного спектра сигнала возмущения |X(jw)| и частотных характеристик системы. В химико-технологических процессах сигналы, как правило, являются низкочастотными, т.е. их мощность, в основном сосредоточена в диапазоне [0, wmax ], wmax – верхнее значение частоты, на которой частотный спектр сигнала становится меньше заданной величины.
Комбинированную АСР можно рассматривать, как двухступенчатый фильтр для сигнала возмущения, состоящий из разомкнутой и замкнутой системы. Характерной особенностью замкнутой системы регулирования является наличие пика на амплитудно-частотной характеристике на рабочей частоте wp, в окрестности которой она обладает наихудшими фильтрующими свойствами. Поэтому обычно условие приближенной инвариантности () обеспечивается для двух частот w=0 и w=wp. При этом компенсация возмущения на нулевой частоте обеспечивает инвариантность системы в установившихся статических режимах, если | Wзс(jw) | ¹ 0 при w=0 (например, при использовании П-регулятора) или повышает качество регулирования при ступенчатых возмущениях, когда | X(j×0) | = ¥ при w=0.
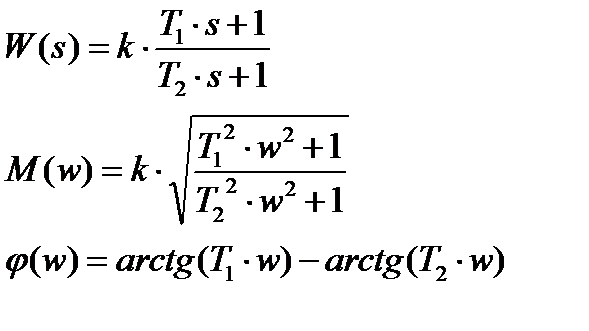
Наиболее часто компенсаторы выбираются в виде комбинации апериодического звена первого порядка и реального дифференцирующего. Ниже приведены динамические характеристики наиболее распространенных компенсаторов. Однако, следует учитывать, что в современных АСР при применении микропроцессорных устройств можно добиться не приближенного, а точного условия инвариантности.
Таблица Х
1. Апериодическое звено:
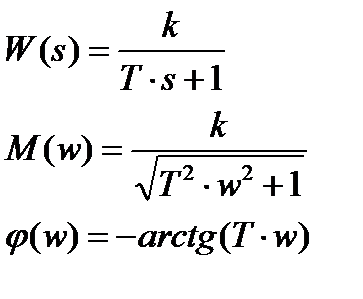
| 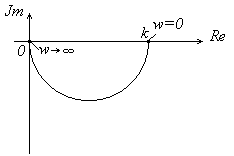
|
2. Реальное дифференцирующее звено:
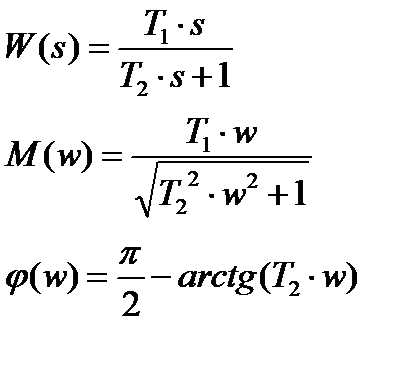
| 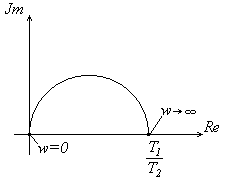
|
3. Интегро-дифференцирующее звено:
| 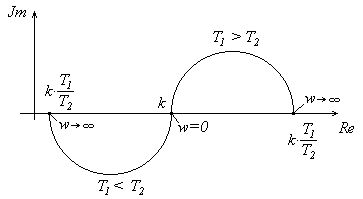
|








