 2020-04-12
2020-04-12 359
359Изменить направление движения автомобиля можно двумя различными способами:
- за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ);
- за счет создания на колесах правого и левого бортов различных по величине или по направлению продольных сил (силовой способ, см. рис. 1,а).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем:
- поворота управляемой оси (рис. 1,б);
- поворота управляемых колес (рис. 2,а);
- поворота сочлененных звеньев (складывания рамы, см. рис. 2,б);
- комбинированный способ (рис. 2,в).
Силовой способ поворота автомобиля аналогичен способу поворотов гусеничных машин. При этом способе функции рулевого управления выполняет специальная трансмиссия. При воздействии водителя на органы управления трансмиссия подтормаживает колеса одного борта с подачей тяговых сил на колеса другого, что вызывает появление момента сил правого и левого борта, который стремится повернуть машину относительно вертикальной оси. Такая схема управления обеспечивает поворот практически на месте. Но силовой способ управления на современных автомобилях почти не применяется, что связано с низкой точностью управления на больших скоростях, высоким износом шин, необходимостью устанавливать двигатели повышенной мощности и сложные трансмиссии.
Поворот управляемой оси - это наиболее старый из известных способов управления. Система управления получилась очень простой, но не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля. Поворот управляемой оси сегодня применяется только на прицепах.
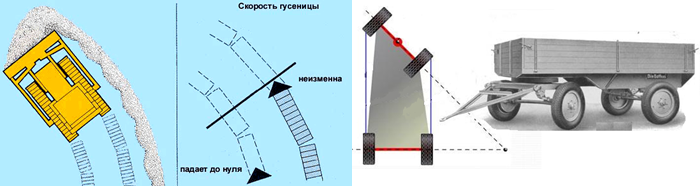
а б
Рисунок 1 – Различные способы осуществления поворота транспортного средства.
а – силовой способ осуществления поворота; б – поворот управляемой оси.
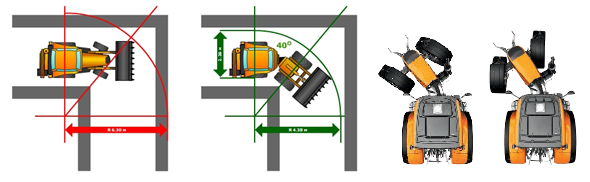
а б в
Рисунок 2 – Различные способы осуществления поворота транспортного средства.
а – поворот управляемых колес; б – поворот сочлененных звеньев; в – комбинированный способ.
Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруднен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя ось. Обе части соединены друг с другом подвижно с помощью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высоких скоростях, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим основная сфера использования — тихоходные тракторы, дорожно-строительные машины и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колесами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом - рулевой трапецией.
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота:
- колеса занимают при поворотах небольшой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.);
- для поворота колес требуются незначительные усилия;
- близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.

Двухосное транспортное средство имеет, как правило, одну переднюю ось с управляемыми колесами (рис.3,а). Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами (рис.3,в), но при этом усложняется конструкция рулевого управления, и возникают проблемы с управляемостью на высоких скоростях. Поэтому на автотранспортных средствах с передними и задними управляемыми колесами при движении с высокими скоростями принудительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Рисунок 3 - Схемы поворота транспортных средств с различным числом управляемых осей.
а – двухосное ТС с передней управляемой осью; б - трехосное ТС с передней управляемой осью; в - двухосное ТС с передней и задней управляемыми осями; г - трехосное ТС с передней и задней управляемыми осями; д - четырехосное ТС с передней и задней управляемыми осями; е - трехосное ТС с передней и средней управляемыми осями; ж - четырехосное ТС с первой и второй управляемыми осями; з - четырехосное ТС со всеми управляемыми осями.
Для современных скоростных легковых автомобилей конструкция подвески задних неуправляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектированной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили (рис. 3,б), но при условии, что вторая и третья неуправляемые оси сближены.
Если эти оси разнесены или автомобиль имеет более трех осей, то для предотвращения бокового проскальзывания колес применяют несколько осей с управляемыми колесами (рис. 3). При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидравлических передач, которые управляют их поворотом. Управляемые колеса полуприцепов могут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полуприцепом или двумя частями сочлененных автобусов.
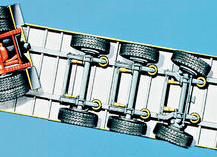 В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов (полуприцепов) делаются самоустанавливающимися, т. е. колеса на повороте сами поворачиваются на углы, при которых на них не воздействуют боковые силы (рис. 4).
В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов (полуприцепов) делаются самоустанавливающимися, т. е. колеса на повороте сами поворачиваются на углы, при которых на них не воздействуют боковые силы (рис. 4).
Рисунок 4 – Задние поворотные колеса полуприцепа.








