 2020-05-12
2020-05-12 175
175КРАТКИЙ КУРС ЛЕКЦИЙ
ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
СОДЕРЖАНИЕ
Введение...................................................................................................... 6
РАЗДЕЛ I. СТАТИКА
1 Основные понятия и определения........................................................ 7
Аксиомы статики................................................................................ 8
Свободное и несвободное тело. Реакция связи............................... 10
Основные виды связей без трения................................................... 11
Распределенные силы...................................................................... 13
2 Система сходящихся сил...................................................................... 14
Теорема о равновесии трех непараллельных сил.......................... 15
Проекция силы на ось...................................................................... 15
Аналитическое определение равнодействующей сходящейся
системы сил............................................................................................ 16
3 Момент силы относительно центра, точки и оси............................. 17
Теорема Вариньона о моменте равнодействующей....................... 19
Уравнение линии действия равнодействующей плоской
системы сил............................................................................................ 20
4 Теория пар сил...................................................................................... 22
Сложение двух параллельных сил.................................................. 22
Пара сил. Момент пары сил............................................................ 23
Свойства пар.................................................................................... 24
Сложение пар, лежащих в пересекающихся плоскостях............... 24
5 Приведение системы сил к данному центру (точке)......................... 26
Теорема Пуансо о параллельном переносе силы........................... 26
Приведение системы сил к данному центру................................... 26
6 Аналитические условия равновесия систем сил............................... 32
7 Ферма...................................................................................................... 36
Леммы о нулевых стержнях............................................................ 37
8 Статически определимые и неопределимые задачи. Составные
конструкции. Рычаг................................................................................ 38
Статически определимые и статически не определимые задачи.... 38
Определение реакций опор составных конструкций..................... 39
Рычаг. Устойчивость при опрокидывании..................................... 40
9 Трение..................................................................................................... 42
Трение скольжения. Сцепление....................................................... 42
Угол и конус трения......................................................................... 43
Трение качения................................................................................. 43
10 Центр тяжести. Координаты центра тяжести.................................. 45
Центр параллельных сил............................................................... 45
Центр тяжести твердого тела......................................................... 46
Центр тяжести плоской фигуры..................................................... 47
Центр тяжести линии...................................................................... 47
Методы определения центра тяжести............................................ 48
РАЗДЕЛ II. КИНЕМАТИКА
1 Способы задания движения точки...................................................... 53
Векторный способ задания движения............................................. 53
Координатный способ задания движения....................................... 55
Естественный способ задания движения......................................... 59
Взаимосвязь естественного и координатного способов................. 64
2 Простейшие движения твердого тела................................................. 66
Поступательное движение твердого тела........................................ 66
Вращательное движение твердого тела.......................................... 68
3 Плоскопараллельное движение тела.................................................. 70
Различные случаи определения положения МЦС.......................... 73
Теорема об ускорениях точек плоской фигуры.............................. 74
Мгновенный центр ускорений......................................................... 75
4 Сложное движение точки..................................................................... 76
Относительное, переносное и абсолютное движения точки........... 76
Теорема о сложении скоростей........................................................ 77
Теорема о сложении ускорений....................................................... 79
РАЗДЕЛ III. ДИНАМИКА
1 Законы динамики материальной точки............................................ 83
Закон инерции (Закон Галилея-Ньютона)....................................... 83
Закон пропорциональности силы и ускорения............................... 83
Закон равенства действия и противодействия................................. 84
Закон независимости действия сил.................................................. 85
2 Дифференциальные уравнения движения. Основные задачи динамики 85
Первая (прямая) задача динамики.................................................. 86
Вторая (обратная) задача динамики............................................... 87
Интегрирование дифференциальных уравнений прямолинейного движения................................................................................................. 88
3 Колебательное движение материальной точки................................ 89
Гармонические колебания................................................................ 89
4 Дифференциальное уравнение относительного движения
материальной точки................................................................................ 92
Частные случаи относительного движения материальной точки... 93
5 Динамика механической системы....................................................... 95
Классификация сил, действующих на материальные точки
механической системы........................................................................... 95
Дифференциальные уравнения движения механической системы... 96 5.3 Центр масс механической системы........................................................ 97
Осевые моменты инерции твердого тела......................................... 97
Моменты инерции некоторых однородных тел.............................. 99
6 Общие теоремы динамики................................................................. 101
Теорема о движении центра масс механической системы............ 101
Теорема об изменении количества движения................................ 102
Теорема об изменении момента количества движения................. 104
Дифференциальное уравнение вращательного движения твердого тела 105
7 Теорема об изменении кинетической энергии................................. 106
Работа и мощность сил.................................................................. 106
Теорема об изменении кинетической энергии............................... 111
8 Принцип д’Аламбера (принцип кинетостатики)............................ 113
9 Принцип возможных перемещений (принцип Лагранжа)............. 115
Классификация связей.................................................................... 115
Возможные перемещения. Принцип Лагранжа............................ 116
10 Общее уравнение динамики (Принцип д’Аламбера-Лагранжа). 117
Литература.............................................................................................. 118
ВВЕДЕНИЕ
Теоретическая механика – наука, в которой изучаются общие законы механического движения и механического взаимодействия материальных тел.
Под движением в механике понимается изменение положения твердого тела в пространстве и во времени, относительно других тел.
Пространство в классической механике рассматривается как абсолютное, трехмерное, в котором все построения базируются на геометрии Евклида.
Время в классической механике так же абсолютно.
Тела, относительно которых мы рассматриваем движение данного тела, называются телами отсчета. Тело отсчета со скрепленными с ним осями координат называется системой отсчета.
Система отсчета, которая находится в покое или движется прямолинейно и равномерно, называется инерциальной.
Абсолютно твердое тело – тело, в котором расстояния между любыми точками остается неизменным при взаимодействии с другими телами.
На основе законов механики базируются дисциплины: сопротивление материалов, строительная механика, инженерные конструкции и т.д.
Механика состоит из трех основных разделов:
– статика;
– кинематика;
– динамика.
РАЗДЕЛ I. СТАТИКА
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Статика – раздел механики, изучающий условия равновесия материальных тел или систем тел, под действием приложенных к ним сил.
Покой (равновесие) – состояние тела, при котором его положение относительно инерциальной системы отсчета остается неизменным.
Одним из основных понятий в теоретической механике является понятие силы.
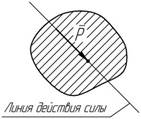
Рисунок 1.1
Сила – векторная величина, являющаяся мерой механического взаимодействия материальных тел.
Геометрически сила изображается вектором (рисунок 1.1), который характеризуется:
1) числовым значением (модулем);
2) направлением;
3) линией действия, которая пролегает вдоль вектора силы в оба направления.
Совокупность нескольких сил, действующих на данное тело, называется системой сил.
Если одну систему сил можно заменить другой, и при этом тело не изменит своего кинематического состояния, то эти системы считаются эквивалентными.
Уравновешенными системами сил называются системы сил, которые будучи приложенными к покоящемуся телу не изменят его кинематического состояния, т.е. эквивалентные нулю.
Силы, действующие на данное тело со стороны других тел, называются внешними.
Силы, с которыми частицы данного тела действуют друг на друга, называются внутренними.
Основной задачей статики является исследование условий равновесия внешних сил, приложенных к абсолютно твердому телу.
Аксиомы статики
1. Аксиома инерции. Под действием взаимно уравновешенных сил тело находится в состоянии покоя или движется прямолинейно и равномерно.
2. 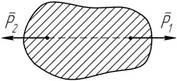 Аксиома равновесия двух сил (рисунок 1.2). Две силы, приложенные к твердому телу, уравновешенны только в том случае, если они равны по модулю и направлены по одной прямой в противоположные
Аксиома равновесия двух сил (рисунок 1.2). Две силы, приложенные к твердому телу, уравновешенны только в том случае, если они равны по модулю и направлены по одной прямой в противоположные


 Рисунок 1.2
Рисунок 1.2
стороны:


 Р 2 =
Р 2 =
Р 1,
Р 2 = - Р 1.
3.
 |  |  |
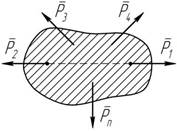 Аксиома присоединения и исключения уравновешенных сил (рисунок 1.3). Кинематиче- ское состояние тела не изменяется, если к нему присоединить или отбросить уравновешенную
Аксиома присоединения и исключения уравновешенных сил (рисунок 1.3). Кинематиче- ское состояние тела не изменяется, если к нему присоединить или отбросить уравновешенную
систему сил (Р 3 , Р 4 ,..., Рn ).
Рисунок 1.3
Если (Р 1, Р 2 ) эквивалентна нулю, то система



 сил (Р 1, Р 2 , Р 3 , Р 4 ,..., Рn ) эквивалентна (Р 3 , Р 4 ,..., Рn ).
сил (Р 1, Р 2 , Р 3 , Р 4 ,..., Рn ) эквивалентна (Р 3 , Р 4 ,..., Рn ).
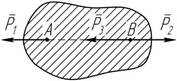
Рисунок 1.4
Следствие. Не изменяя кинематического состояния абсолютно твердого тела, силу можно переносить вдоль ее линии действия, сохраняя неизменными ее модуль и направление.
Доказательство (рисунок 1.4). К телу, на которое в точке A
действует сила

 Р 1, прикладываем в точке B уравновешенную систему сил
Р 1, прикладываем в точке B уравновешенную систему сил
(Р 2 , Р 3 ), направленных вдоль линии действия силы
Р 1, причем
Р 1 = - Р 2,



 Р 1 = Р 2
Р 1 = Р 2
= Р 3
. Согласно третьей аксиоме, кинематическое состояние тела


 не изменилось. Теперь рассмотрим получившуюся систему сил (Р 1, Р 2 ). По условию они равны по модулю, направлены вдоль одной прямой в противоположные стороны, т.е. эта система эквивалентна 0. Поскольку они уравновешены, то по третьей аксиоме эту систему сил можно
не изменилось. Теперь рассмотрим получившуюся систему сил (Р 1, Р 2 ). По условию они равны по модулю, направлены вдоль одной прямой в противоположные стороны, т.е. эта система эквивалентна 0. Поскольку они уравновешены, то по третьей аксиоме эту систему сил можно
отбросить и тогда, тело окажется под действием одной силы
Р 3,
приложенной в точке В. Так как
Р 1 = Р 3, то, фактически, мы перенесли
силу
Р 1 вдоль линии ее действия в точку В.
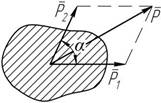
Рисунок 1.5
4. Аксиома параллелограмма сил (рису- нок 1.5). Две силы, приложенные под углом, эквивалентны одной силе (равнодействующей), которая приложена в точке их пересечения и
изображается диагональю параллелограмма, по-
 строенного на этих силах, как на сторонах. Сила P эквивалентна (Р 1, Р 2 ):
строенного на этих силах, как на сторонах. Сила P эквивалентна (Р 1, Р 2 ):
 P = P 1 + P 2 ;
P = P 1 + P 2 ;
 P = .
P = .
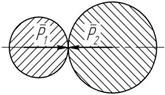
Рисунок 1.6
5. Аксиома равенства действия и противодействия (рисунок 1.6). Всякому дейст- вию соответствует равное и противоположно направленное противодействие:
Р 1 = - Р 2.
Силы
Р 1 и
Р 2 не уравновешены, так как приложены к разным телам.
6. Аксиома затвердевания. Равновесие сил, приложенных к деформирующемуся телу, сохраняется при его затвердевании. (Не имеет обратного действия).








