 2020-05-12
2020-05-12 556
556ЭНЕРГОСБЕРЕЖЕНИЕ СРЕДСТВАМИ ЭЛЕКТРОПРИВОДА
Главным вектором развития топливно-энергетического комплекса и всей экономики Российской Федерации в целом является повышение эффективности и конкурентоспособности. Одним из основных средств достижения этих целей является повышение энергетической эффективности и энергосбережения на промышленных предприятиях топливно-энергетического комплекса [1].
Хорошо известно, что от 60 % до 75 % всей вырабатываемой электроэнергии расходуется электроприводами, которые используются в различных электротехнических системах и промышленных комплексах на производственных объектах, обеспечивая протекание сложнейших технологических процессов. Абсолютное значение доли потерь электрической энергии также приходится на электроприводы и составляет около 80 %. Таким образом, электроприводы, используемые на промышленных предприятиях, имеют наибольший потенциал энергосбережения, и от их рационального использования зависит уровень энергоэффективности и конкурентоспособности промышленности Российской Федерации, в том числе предприятий топливно-энергетического комплекса.
Вопросы практического энергосбережения на промышленных предприятиях, безусловно, связаны с энергетическим обследованием (энергоаудитом) всех энергетических систем и крупных потребителей. На многих промышленных объектах высоковольтные электроприводы большой мощности обеспечивают до 95 % от общего потребления электроэнергии. Именно поэтому, сначала необходимо рассмотреть вопрос энергетического обследования электроприводов, включая электродвигатели, преобразователи частоты, трансформаторы и другое электротехническое оборудование, входящее в состав электроприводов.
Важной частью повышения энергоэффективности и энергосбережения промышленных предприятий, помимо непосредственного (инструментального) энергетического обследования, является выработка рекомендаций по повышению ресурсосбережения (энергосбережения). Основным вопросом здесь является технико-экономическое обоснование эффективности предлагаемых энергосберегающих мероприятий. Большое внимание уделено обоснованию эффективности не только между регулируемым и нерегулируемым электроприводом. На многих предприятиях остро стоит вопрос обоснования выбора типа привода, например, между газотурбинным и электрическим. Дополнительно, необходимо рассматривать метод оценки эксплуатационно-технических характеристик регулируемых электроприводов, который можно выполнить на основе экспертной оценки характеристик технических решений электроприводов, рекомендованных к внедрению.
Основными энергетическими характеристиками промышленных электроприводов являются коэффициент полезного действия и коэффициент мощности.
Основной проблемой современных промышленных электроприводов является обеспечение электромагнитной совместимости преобразователей частоты с сетью электроснабжения.
Электромагнитная совместимость промышленного электропривода – это способность преобразователя частоты функционировать без негативного влияния на качество электрической энергии сети электроснабжения, не оказывать негативного электромагнитного воздействия на окружающее электротехническое оборудование, а также, выполнять необходимые технические задачи при низких показателях качества электрической энергии в энергоснабжающей сети и под действием электромагнитного воздействия окружающего электротехнического оборудования.
Другой значимой проблемой промышленных электроприводов является обеспечение электромеханической совместимости преобразователей частоты с приводными электродвигателями.
Электромеханическая совместимость промышленного электропривода – это способность электрического двигателя обеспечить удовлетворительный уровень электромеханического преобразования при отклонении параметров качества потребляемой электрической энергии, получаемой от преобразователя частоты, от нормативно установленных значений.
Современные электроприводы, в преобразователях частоты которых установлены активные выпрямители, могут обеспечивать возврат электрической энергии в сеть электроснабжения (рекуперацию) при торможении. Это обстоятельство позволяет выделить взаимный обмен электроэнергией электропривода и сети электроснабжения в отдельную научно-техническую проблему и говорить об энергетической совместимости электропривода.
Энергетическая совместимость промышленного электропривода – это способность двухстороннего обмена электрической энергией между электроприводом и сетью электроснабжения.
В настоящее время, для повышения энергетической эффективности промышленных электроприводов и решения проблем в части электромагнитной, электромеханической и энергетической совместимости, можно выделить несколько путей, которые можно разделить на технико-структурные и алгоритмически-модуляционные методы.
Одним из наиболее простых способов повышения энергетической эффективности электроприводов, является использование электродвигателей с высоким коэффициентом полезного действия, так называемых, энергоэффективных электродвигателей.
Другой способ заключается в использовании полупроводниковых преобразователей частоты, в состав которых входят высокотехнологичные коммутаторы, типа активный выпрямитель и автономный инвертор. Такие преобразователи частоты способны обеспечить работу асинхронного электропривода, который является активно-индуктивной нагрузкой для сети электроснабжения, с единичным коэффициентом мощности.
Повысить энергетические характеристики асинхронных электроприводов можно за счет использования высокоэффективного алгоритмического обеспечения, которое способно обеспечивать высокие динамические характеристики электроприводов и эффективное использование электрической энергии, как в установившихся, так и в переходных режимах. К таким системам управления режимами работы приводных асинхронных двигателей можно отнести векторное и релейно-импульсное управление. К последним можно отнести системы прямого и фаззи-логического управления электромагнитным моментом асинхронного двигателя.
В значительной степени, эффективность использования преобразователей частоты регулируемых электроприводов, влияет на их энергетические показатели в целом. Так, например, в части управления полупроводниковыми транзисторными ключами автономных инверторов, стандартным решением является использование алгоритмов широтно-импульсной модуляции. Для повышения эффективности этого алгоритма используют методы предварительной модуляции управляющего сигнала (предмодуляции). В современных преобразователях частоты все чаще используются алгоритмы пространственно-векторной модуляции, для повышения эффективности которых, также разработано несколько методов.
Конечно, для эффективного функционирования электроприводов на промышленных предприятиях, на стадии проектирования и разработки каждого электропривода, должен быть выполнен рациональный выбор его элементов. Во многом от этого зависит не только качество работы самого электропривода, но и протекание технологических процессов, которые он обеспечивает, а также, работа других электротехнических систем и комплексов предприятий.
Энергетические характеристики современного электропривода и уровень совместимости в значительной степени определяются структурой преобразователя частоты. Для повышения эффективности работы преобразователей частоты и электропривода в целом, можно выделить следующие способы:
- использование полупроводниковых ключей с низким сопротивлением в открытом состоянии для повышения коэффициента полезного действия;
- использование высокочастотных полупроводниковых ключей для снижения несинусоидальности напряжения и тока;
- использование активного выпрямителя для обеспечения коэффициента мощности электропривода;
- использование активных фильтров, для компенсации высших гармоник напряжения, генерируемых группой электроприводов, и повышения их коэффициента мощности.
Энергосбережение в ЭП может быть достигнуто как на стадии его проектирования и конструирования, так и при эксплуатации ЭП.
Проектирование и конструирование ЭП должно соответствовать современному уровню развития теории и практики ЭП и смежных областей науки и техники — электромеханики, электроники, автоматики, механики и вычислительной техники. Энергосбережение при этом может осуществляться следующими методами и средствами.
1. Обоснованный расчет требуемой мощности двигателя исполнительного органа рабочей машины или производственного механизма с учетом всех условий его работы. Двигатель завышенной мощности имеет низкие энергетические показатели работы и при этом также имеет место недоиспользование заложенных в него материальных ресурсов.
С другой стороны, применение двигателя недостаточной мощности снижает производительность технологического оборудования, приводит к перегрузке двигателя и преждевременному выходу его из строя.
2. Выбор силовых элементов ЭП, характеризующихся при работе минимальными потерями энергии. В первую очередь это относится к выбору двигателей, в отношении которых можно назвать следующие возможности энергосберегающих решений:
- • применение энергосберегающих двигателей, в которых за счет увеличенных объемов активных материалов (меди и стали) потери мощности снижены не менее чем на 15—20%. В российских каталогах такие двигатели имеют в обозначении букву «е»;
- • применение двигателей с уменьшенным моментом инерции ротора (якоря), в которых имеет место пониженный уровень потери энергии в переходных процессах. К таким двигателям относятся двигатели с удлиненным ротором (например, асинхронные двигатели краново-металлургической серии 4МТ и 4МТК) и двигатели с полым ротором (якорем). Снижение момента инерции ЭП можно получить при использовании вместо одного двигателя двух двигателей половинной мощности на ту же скорость вращения.
Задачу энергосбережения решает применение имеющих высокий КПД полупроводниковых преобразователей и механических передач с небольшими потерями мощности.
3. Ориентирование на применение регулируемого ЭП по системе «преобразователь — двигатель», что позволяет реализовывать экономичные способы регулирования переменных ЭП в установившихся и переходных режимах.
4. Выбор рациональных способов и технических средств регулирования переменных ЭП, использование которых не вызывает дополнительных потерь энергии при его работе. К таким способам относится, например, регулирование скорости двигателей переменного тока с помощью полупроводниковых преобразователей частоты, рассмотренное в подразделах 5.4 и 6.2.
В общем случае энергосбережение [2] может осуществляться как в самом ЭП, так и в обслуживаемых им технологических процессах, где используется вырабатываемая им механическая энергия. При этом применение регулируемого ЭП позволяет обеспечить при реализации многих технологических процессов энергосбережение, иногда во много раз превосходящее экономию энергии в самом ЭП.
Например, регулирование скорости ленты транспортера за счет ЭП, подающего детали в закалочную печь, позволяет минимизировать количество тепловой энергии на их закалку в зависимости от их сортамента, технологии закалки и других факторов. Ученые провели исследования электроприводов длинных конвейеров и показали, что сокращение числа порывов ленты – наиболее дорогого элемента конвейера (40–75 % стоимости всей конвейерной установки) достигается применением частотно-регулируемого электропривода с задатчиком интенсивности и дополнительной корректирующей связью по разности скоростей приводного и ведомого барабанов. Для эффективного гашения упругих колебаний в электроприводе буровых станков предложено использование дополнительных FUZZY-регуляторов [3]. В промышленности строительных материалов важной задачей является снижение удельного расхода электрической энергии затрачиваемой на помол клинкера, что достигается обеспечением равномерной подачи клинкера в мельницу. В настоящее время широкое распространение получили системы, функционирующие на основе принципа непрерывного измерения массового расхода материала.
Типовая блок-схема весового дозатора представлена на рисунке 8.1.
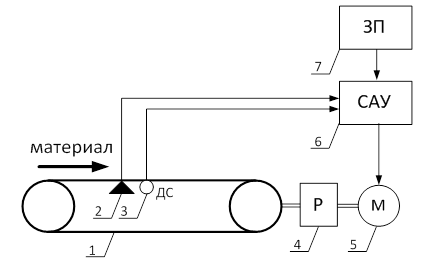
Рисунок 8.1. Блок-схема ленточного весового дозатора
Непрерывное дозирование сыпучих материалов обеспечивается автоматической системой, состоящей из ленточного конвейера 1, тензодатчика 2, датчика скорости 3, редуктора 4, электродвигателя 5, системы автоматического управления 6 и задатчика производительности 7.
Материал из питателя поступает на транспортерную ленту и занимает пространство, ограниченное защитным кожухом, шиберным затвором и приемной платформой с транспортерной лентой. При включении электропривода материал начинает перемещаться транспортерной лентой через промежуток, ограниченный защитным кожухом и заслонкой шиберного затвора и перемешается через взвешивающую и разгрузочную платформу к разгрузке. Электрические сигналы датчика скорости и датчика давления, пропорциональные величинам скорости ленты и веса материала на взвешивающей платформе, поступают на устройство управления, где производиться постоянное вычисление фактического значения массового расхода материала и сравнение его с заданным значением. За счет изменения скорости движения ленты корректируется величина подачи материала.
Весьма эффективно регулируемый по скорости ЭП может обеспечить энергосбережение в таких рабочих машинах, как насосы, вентиляторы и компрессоры. Поскольку эти рабочие машины широко используются в промышленности, на транспорте, в сельском и в жилищно-коммунальном хозяйстве, потребляя по различным оценкам 30—40% вырабатываемой электроэнергии, энергосбережение в этой сфере средствами ЭП оказывается очень эффективным.
Пример очень высокоэффективного энергоресурсосбережения — система оптимизации процесса горения в водяных и паровых котлах.
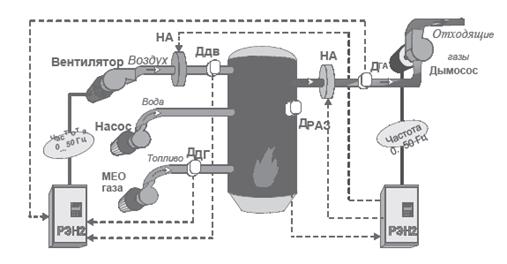
Рис. 8.2. Основная схема модернизации котла (вариант № 1)
РЭН2 – преобразователь частоты; Ддв – датчик давления воздуха; Ддг – датчик давления топлива (газа); Драз – датчик разрежения в топке; Дга – газоанализатор; Дув – датчик уровня воды; Дт – датчик температуры воды; Дв – датчик давления воды; НА – направляющий аппарат (задвижка)
По данным датчиков системы микропроцессор вычисляет оптимальное соотношение «топливо-воздух» и с помощью преобразователей «РЭН2» изменением частоты вращения электроприводов вентилятора и дымососа обеспечивает: максимально высокий к.п.д. котла при больших колебаниях давления присоединительного газа; практически мгновенную реакцию на изменение внешних факторов и энергетических показателей котла; возможность работы на предельно малых давлениях топлива (газа) на входе без остановки или отключения автоматики с обеспечением полной функциональности котла; возможность автоподхвата частоты вращающихся тягодутьевых механизмов при провалах сети. На паровых (2,5÷500 т. пара/час) и водогрейных (2,5÷200 Гкал/час) котлах, работающих на природном газе, мазуте или пылеобразном топливе система «ЭКО-3» позволяет:
– экономить 2...5 % – топлива (газа, мазута); до 10 % – угля;
– экономить 50...70 % электроэнергии (в т. ч. полностью исключить потребление реактивной мощности из электросети);
– динамически поддерживать максимальный к.п.д. котла во всем диапазоне его нагрузок в автоматическом круглосуточном режиме;
– выполнить требования экологических норм по выбросам в атмосферу;
– полностью автоматизировать котёл;
– обеспечить более высокую безопасность и надёжность котла;
– увеличить срок службы в 3–5 раз тягодутьевых устройств котла, защитно-коммутационной и запорной аппаратуры;
– резко сократить объем эксплуатационных и ремонтно-восстановительных затрат.
При эксплуатации электроприводов энергосбережение может быть достигнуто за счет правильного технического обслуживания и проведения мероприятий по их модернизации.
Наибольшие возможности по энерго- и ресурсосбережению как при проектировании новых, так и при модернизации действующих электроприводов предоставляют регулируемые электроприводы. Рассмотрим возможности энерго- и ресурсосбережения при использовании электроприводов переменного тока по системе «тиристорный регулятор напряжения — асинхронный двигатель» и «преобразователь частоты — асинхронный двигатель», получающих все более широкое распространение на практике для рабочих машин и производственных механизмов массового применения.
В системе «тиристорный регулятор напряжения — асинхронный двигатель» возможность энергосбережения при использовании тиристорных регуляторов напряжения иллюстрируют графики на рис. 9.7, а, представляющие собой зависимости тока статора асинхронного двигателя 1Х от напряжения Ux при разных моментах нагрузки Мс. При каждой нагрузке имеется такое напряжение, при котором потребляемый двигателем ток минимален.
При этом важно отметить два обстоятельства: точка минимума соответствует напряжениям меньше номинального, а минимизация тока происходит за счет снижения реактивной составляющей тока.
Штриховая линия на рис. 9.7, а, проведенная через точки минимумов тока для каждой нагрузки, определяет закон регулирования напряжения в функции тока, при реализации которого при любом Мс из сети потребляется минимальный ток.
Схема ЭП с минимизацией потребляемого двигателем тока приведена на рис. 9.7, б. В его состав входят асинхронный двигатель АД, тиристорный регулятор напряжения ТРН с системой управления СУ ТРИ, датчики тока ДТ и напряжения ДН, функциональный преобразователь ФП и инерционное звено ИЗ.
Требуемый закон управления ЭП реализуется с помощью положительной обратной связи по току. Датчик тока вырабатывает пропорциональный току сигнал, поступающий на вход функционального преобразователя, который обеспечивает требуемую зависимость между подаваемым на двигатель напряжением и моментом нагрузки на его валу (штриховая линия на рис. 9.7, а). В системе используется инерционное звено, с помощью которого обеспечивается необходимое качество переходных процессов.
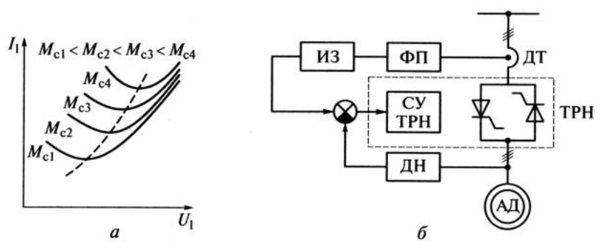
Рис. 9.7. U - Образные характеристики (а) и схема асинхронного ЭП (б) при минимизации потребляемого тока
В общем случае за счет регулирования напряжения на статоре двигателя при малых нагрузках или холостом ходе могут быть снижены ток, потребляемая из сети мощность, потери мощности или повышены его КПД и cos φ. На рис. 9.8 для примера показаны построенные для двигателя типа 4А180М4 мощностью 30 кВт зависимости КПД, cos φ, относительных тока статора I1* = I1 / I 1 ном и потерь мощности Δ Р* = Δ Р / Δ Рном от относительного напряжения на статоре U* = U1 / U1ном при моменте нагрузки, составляющем 20% от номинального. Приведенные кривые показывают, что наибольших значений эти переменные достигают при напряжениях 60—80% от номинального, причем точки экстремума для рассматриваемых энергетических показателей в общем случае не совпадают.
Экстремальные значения энергетических показателей достигаются при работе двигателя с определенными оптимальными скольжениями. Так, для обеспечения минимума потребляемого тока статора при любых нагрузках асинхронного двигателя его скольжение должно поддерживаться на уровне

Поддержание скольжения на требуемом оптимальном уровне может быть получено в системе с отрицательной обратной связью по скорости (схема на рис. 5.39, а), что наряду со схемой на рис. 9.7, б позволяет реализовать наилучшие энергетические показатели работы ЭП.
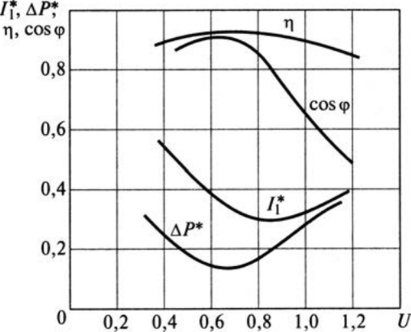
Рис. 9.8. Зависимости КПД, коэффициента мощности, тока и потерь мощности асинхронного двигателя от напряжения на статоре
Помимо применения для решения задачи энергосбережения тиристорные регуляторы напряжения широко используются в качестве так называемых «мягких» пускателей, или «мягких» стартеров. За счет постепенного повышения подаваемого на двигатель напряжения при пуске они обеспечивают ограничение пусковых токов и моментов асинхронных и синхронных двигателей. При этом не происходит снижения потерь энергии в двигателе, поскольку не изменяется скорость вращения магнитного поля, но вследствие ограничения тока и момента существенно снижаются усилия, действующие на проводники обмоток двигателей, их подшипники и на элементы механической передачи и исполнительного органа рабочих машин. За счет этого повышается надежность работы электропривода и технологического оборудования, уменьшается количество ремонтов, что в конечном итоге ведет к экономии энергетических и материальных ресурсов.
Система «преобразователь частоты — асинхронный двигатель». Ранее было отмечено, что регулирование скорости асинхронных двигателей при использовании преобразователей частоты не сопровождается дополнительными потерями мощности, а применение частотно-управляемых пуска и торможения двигателей обеспечивает снижение потерь энергии в переходных процессах и возможность ее рекуперации в сеть при торможении. Рассмотрим энергосбережение на примере частотно-регулируемого ЭП центробежного насоса.
Преобразователи частоты бывают двух типов: ПЧ с непосредственной связью с сетью и преобразователи с промежуточным звеном постоянного тока (ПЗПТ). Первый тип преобразователей обладает более высоким КПД, однако у него можно выделить такие недостатки, как невысокий коэффициент мощности и ограниченное регулирование выходной частоты. Поэтому в составе насосных установок подобные преобразователи не применяются. ПЧ с промежуточным звеном постоянного тока имеют меньший КПД из-за двукратного преобразования энергии, однако позволяют осуществлять регулировку частоты как ниже, так и выше номинальной частоты двигателя. Благодаря этому можно увеличить подачу выше номинальной при определённых условиях. Поэтому при выборе ПЧ в ходе проектирования или модернизации насосных установок отдают предпочтение полупроводниковому преобразователю частоты с ПЗПТ.
Типовая структура электропривода центробежного насоса на базе преобразователя частоты с промежуточным звеном постоянного тока показана на рис. 1.5. ПЧ состоит из выпрямителя, звена постоянного тока, тормозной цепи, автономного инвертора напряжения и системы управления.
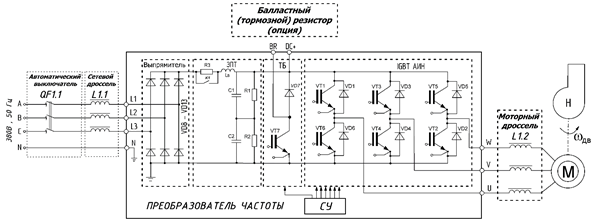
Рис. 1.5. Структура электропривода центробежного насоса на базе преобразователя частоты с промежуточным звеном постоянного тока
На рис. 1.5 обозначены следующие элементы:
QF1.1 – автоматический выключатель;
L1.1 – сетевой дроссель; L1.2 – моторный дроссель;
VT1-VT6 – транзисторные ключи инвертора на базе IGBT;
VT7 – транзисторный ключ тормозного блока;
VD1-VD6 – обратные диоды транзисторных ключей;
VD8-VD13 – диоды выпрямителя;
С1-С2, R1-R2 – фильтр звена постоянного тока;
ТБ – тормозной блок; ЗПТ – звено постоянного тока;
IGBT АИН – автономный инвертор напряжения на базе IGBT транзисторов;
СУ – система управления IGBT транзисторами;
М – асинхронный электродвигатель; Н –насос.
Особенностью работы многих насосных установок является изменение количества (расхода) подаваемой ими потребителю жидкости (воды). Например, потребление воды в жилых зданиях меняется в течение суток, что иллюстрирует (рис. 9.9) характерный для них суточный график расхода воды Q (t), имеющий два максимума — утренний и вечерний.
Основной характеристикой насоса является зависимость создаваемого им напора (давления) Н от расхода воды Q. На рис. 9.10 показаны эти характеристики для двух скоростей приводного двигателя — номинальной ω и пониженной ω1. Рассмотрим с их помощью возможности энергосбережения при использовании регулируемого ЭП насосных установок, работающих с переменным расходом Q.
Допустим, что в исходном положении насос работал на характеристике I с номинальными расходом QH0M и напором // в точке /. При снижении расхода воды до значения Q2 при неизменной скорости ЭП напор насоса в соответствии с характеристикой возрастет до значения Н 2. Для создания этих напора и расхода ЭП будет потреблять из сети мощность

где р — плотность воды, р = 1000 кг/м3; g — ускорение свободного падения, g = 9,81 м/с2; ηн, ηэп — соответственно КПД насоса и ЭП.
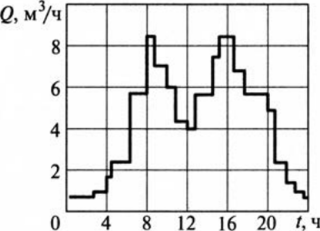
Рис. 9.9. График суточного водопотребления для жилого здания
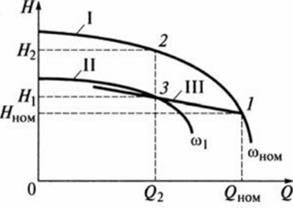
Рис. 9.10. Характеристики насоса
Тот же расход воды может быть обеспечен при меньшем напоре H1 если используется регулируемый ЭП, который позволяет снизить скорость насоса до уровня ω1. В этом случае насос будет работать в точке 3 на характеристике II и из сети будет потребляться (при тех же КПД насоса и ЭП) меньшая мощность

Экономия электроэнергии ЭЭ за время работы Т насоса с расходом Q-, при тех же значениях КПД насоса и ЭП при этом составит:

Примеры реализации регулируемого ЭП насосов показывают, что экономия электроэнергии в системах водоснабжения может доходить до 50% и более в зависимости от вида и режимов работы насосных установок.
Кроме того, работа сетей с меньшими напорами будет характеризоваться и меньшими утечками воды в сетях и арматуре, достигающими иногда 15—20% и более. Применение регулируемого ЭП позволяет также за счет частотно-управляемых плавных пуска и торможения насосного агрегата устранить такое нежелательное явление, как гидравлические удары в гидравлической системе.
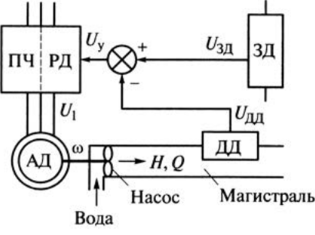
Рис. 9.11. Замкнутая схема регулирования давления
На основе преобразователей частоты может быть при необходимости реализована замкнутая система регулирования (поддержания) напора жидкости в заданной точке гидравлической системы. С этой целью выпускаемые для насосных установок преобразователи частоты имеют встроенный регулятор и задатчик давления и вход для подключения датчика давления. Пример реализации такой системы показан на схеме рис. 9.11.
Схема предназначена для поддержания в магистрали давления воды, перемещаемой насосом. Она включает в себя асинхронный двигатель АД, преобразователь частоты ПЧ с регулятором давления РД, задатчик ЗД и датчик ДД давления, обеспечивающий отрицательную обратную связь по давлению в магистрали.
Схема работает следующим образом. При изменениях давления в магистрали, вызванных изменением расхода воды, происходит изменение сигнала управления Uу = U зд — U дд: при снижении давления этот сигнал увеличивается, а при увеличении давления снижается. Это приводит к соответствующему изменению частоты напряжения U 1, скорости ω АД и к восстановлению заданного уровня давления (характеристика III на рис. 9.10). При использовании ПИ- регулятора давление в магистрали в статическом режиме будет поддерживаться на постоянном уровне.
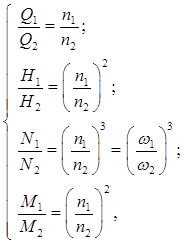
Способ регулирования, при котором изменяется частота вращения рабочего колеса насоса, является наиболее эффективным с энергетической точки зрения способом согласования режимов подачи насосов и потребления жидкости. Изменение частоты вращения рабочего колеса ведёт к изменению всех его рабочих параметров, в том числе и положения характеристик насоса. Из теории гидродинамического подобия насосов следует, что для одного и того же насоса, работающего в двух подобных режимах, справедливы зависимости:
 (1.4)
(1.4)
где Q1, Н1, N1 , M1 – номинальные подача, напор, потребляемая мощность и момент на валу двигателя, соответствующие частоте вращения рабочего колеса n1 (ω1); Q2, Н2 , N2 , M2 –соответствующие параметры при частоте вращения рабочего колеса n2 (ω1).
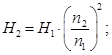
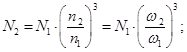
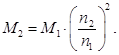
При пересчёте характеристик насоса с частоты n1 на частоту n2 в соответствии с (1.4) получим следующие отношения:

 (1.5)
(1.5)
Как видно из соотношений (1.5) при уменьшении подачи вследствие снижения частоты вращения колеса потребляемая мощность снижается пропорционально третьей степени отношения частот вращения, а следовательно, данный способ регулирования наиболее экономичен.
На рис. 1.3. представлена совмещённая характеристика трубопровода и насоса при регулировании изменением частоты рабочего колеса. Из рисунка видно, что при уменьшении частоты вращения происходит перемещение рабочей точки по естественной напорной характеристике системы (линия Hc+A1Q12) и существенному снижению расхода потребляемой энергии. Таким образом, изменяя скорость вращения ω можно стабилизировать напор H=H ном при колебаниях расхода Q в гидравлической сети.
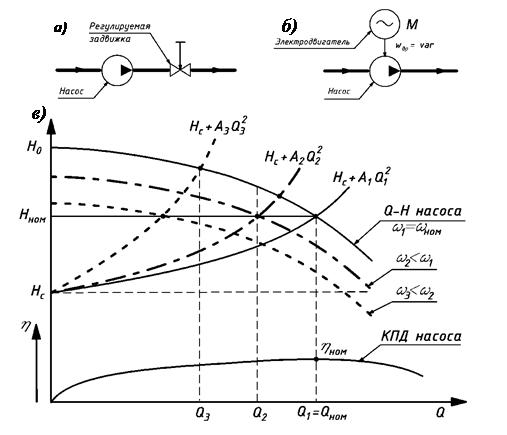
Рис. 1.3. Методы регулирования производительности насосной установки
а) – структурная схема дросселирования; б) - структурная схема частотного регулирования; в) - характеристики насоса и системы при регулировании частоты вращения и дросселировании.
На рис. 1.4. отображены примерные Р-Q характеристики, которые представляют собой потребляемую насосом мощность при дросселировании и частотном регулировании. Разность между значениями этих кривых при определённом расходе объясняется тем, что применение частотного метода регулирования способно обеспечить минимальную мощность двигателя при минимальном расходе воды [8]. Кривая 3 показывает сэкономленную энергию при двух различных методах регулирования.
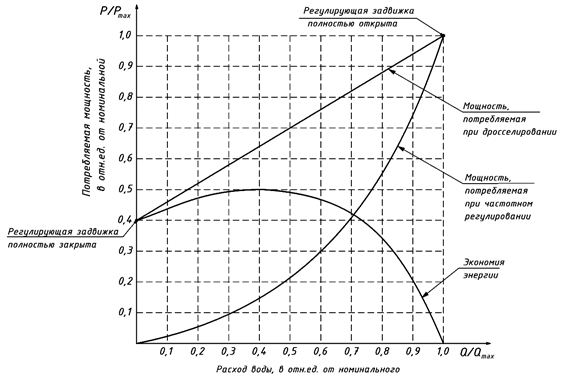
Рис. 1.4. Потребление мощности при различных способах регулирования:
1 — мощность, потребляемая при дросселировании; 2 — мощность, потребляемая при частотном регулировании; 3 — экономия потребляемой мощности.
Таким образом, применение частотного метода регулирования наиболее оправдано, так как при использовании данного метода обеспечивается поддержание постоянного давления в гидросистеме независимо от расхода. При малом потреблении в системе рабочее колесо насоса вращается с малой скоростью для поддержания номинального давления, и при этом не тратится лишняя электроэнергия. В случае увеличения расхода для поддержания снизившегося в системе давления на заданном уровне пропорционально увеличению водопотребления происходит увеличение оборотов насоса.
Задача. Насос обеспечивает водоснабжение здания и в течение года работает с номинальным расходом Q ном = 0,014 м3/с и напором Нном = 50 м в течение времени Тр1 = 1600 ч, с расходом Q 1 = 0,0056 м3/с в течение времени Тр2 = 4000 ч и с расходом Q2 = 0,0028 м3/с и напором H2 = 62 м в течение времени Tр3 = 2400 ч. Насос приводится во вращение асинхронным двигателем, имеющим КПД ηдд = 88%. КПД насоса ηн = 63%. Определить экономию электроэнергии при использовании регулируемого электропривода. Принять, что КПД насоса при изменении его расхода и двигателя при регулировании его скорости не изменяются.
Экономию электроэнергии находим, сопоставляя потребление электроэнергии нерегулируемого и регулируемого по скорости электропривода. КПД насоса и ЭП примем неизменными и равными номинальным.
1. Нерегулируемый по скорости электропривод. Для каждого уровня расхода Q и напора Н по (9.43) находим потребляемые мощность Р и энергию Aпотр = Рпотр Т. Результаты расчета представлены в табл. 9.1.
Таблица 9.1








