 2020-05-21
2020-05-21 143
143Параметры, величину которых необходимо поддерживать постоянными или изменять по какому-либо закону, называют регулируемыми параметрами. Технические объекты, характеризуемые ими, — объектами регулирования.
При неавтоматическом регулировании параметры объекта регулирует оператор, который:
подаёт с помощью управляющего органа У команды управления к объекту регулирования ОР;
получает информацию от измерительного органа И о фактическом значении регулируемого параметра;
на основании анализа результатов и инструкции принимает решение о необходимости и способе воздействия на ОР.
Образуется замкнутая кольцевая цепь передачи сигналов управления и измерения, характерная для процесса регулирования.

Рис. .5. Схема неавтоматического регулирования одного параметра.
Параметры объекта могут регулироваться автоматически. Системы автоматического регулирования состоят из трех групп устройств:
I. измерения действительного значения регулируемого параметра (цепи измерения);
II. задания требуемых значений регулируемого параметра и сравнения их с действительными значениями (регулятор);
III. воздействия на объект регулирования при отклонении регулируемого параметра от требуемого значения (цепи управления).
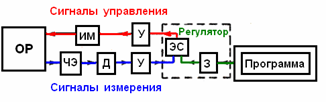
Рис. .6. Схема системы автоматического регулирования.
В состав цепи измерения входят: чувствительный элемент ЧЭ, установленный на объекте регулирования, датчик Д, усилитель У.
Автоматический регулятор состоит из двух частей: задающего устройства З и элемента сравнения ЭС.
Элемент сравнения автоматического регулятора:
· воспринимает сигналы измерения действительного значения регулируемого параметра
· получает сигналы задатчика о требуемых значениях регулируемого параметра. Интенсивность сигналов задатчика и их последовательность определяются заранее установленной программой.
В состав цепи управления объектом регулирования входят: усилитель, реле, исполнительный механизм и т. д.
На всякое отклонение течения процесса в объекте регулирования от заданного автоматический регулятор отвечает образованием управляющего сигнала, направленного на восстановление требуемого режима работы; если объект работает в заданном режиме — сигнал в цепи управления отсутствует.
Элементы автоматической системы также образуют замкнутую цепь: объект — датчик — элемент сравнения — усилитель — исполнительный элемент — объект.
В замкнутую часть системы не входит задатчик, являющийся носителем программы регулирования или задания.
Системы автоматического регулирования строятся на основе принципа обратной связи, сущность которого заключается в том, что управляющее воздействие ставится в зависимость от того результата, который оно вызывает.
Под обратной связью понимают устройство, осуществляющее передачу воздействия с выхода системы или ее элементов на их входы. Такие связи (их может быть несколько в одной системе) реализуются на основе измерительных устройств.
Обратные связи различают:
а) По роду действия
· Положительные (ПОС). Сигнал положительной обратной связи суммируется со входным сигналом системы (элемента). Положительные обратные связи используют в усилителях. В системах управления положительная обратная связь может приводить к нежелательным последствиям.
· Отрицательные (ООС). Сигнал отрицательной обратной связи вычитается из входного сигнала системы (элемента). При этом расхождение между заданием и результатом работы системы уменьшается.
б) По исполнению: внешние и внутренние.
в) По времени (моменту) действия: жесткая и гибкая.
Обратные связи, передающие сигналы, пропорциональные скорости, напряжению и т. д., получают названия по соответствующим величинам, т. е. по скорости, напряжению и т. д. Обратные связи могут осуществляться с помощью электрических, механических и других соединений.
Функциональная схема системы автоматического регулирования.
Принцип работы регулятора основан на том, что регулируемое значение того или иного параметра (температуры, скорости, давления и т.д.) сравнивается с заданным значением. При недопустимом расхождении между этими величинами (ошибке Δ x) регулятор осуществляет воздействие на технологический процесс.

Рис. .7. Функциональная схема замкнутой САР.

Рис. .8. Пример реализации системы автоматического регулирования.
В качестве примера рассмотрим работу регулятора Ползунова (рис. 14, а), принцип действия которого заложен в основу большинства современных регуляторов.
При испарении воды через отверстие 6 её уровень в котле уменьшается. Измерительный элемент ИзЭ (поплавок) 2, опускаясь, перемещает тягу 3 и рычаг 4. Клапан 5 открывается, через водопровод 7 поступает вода. Тяга 3 и рычаг 4 и клапан 5 составляют исполнительный элемент ИЭ. Объектом регулирования О является котел 1, регулируемым параметром — уровень воды Н. Предварительное значение уровня устанавливается смещением поплавка вдоль его тяги (установка задания ЗЭ).
Поплавковые регуляторы нашли применение в карбюраторных двигателях, в системах водоснабжения, канализации и т. д.
Автоматические регуляторы.
В зависимости от того, по какому закону должно изменяться значение регулируемого параметра, различают три вида автоматических регуляторов: стабилизирующие, программные и следящие.
Стабилизирующий регулятор поддерживает параметры процесса постоянным. Требуемое значение этого параметра вводится в регулятор путем настройки задатчика.
Программный регулятор изменяет величину параметра регулирования по заранее установленной программе. Программа изменения параметра в этом случае может быть задана графически, аналитически и т.д.
Следящий регулятор изменяет величину параметра регулирования в зависимости от изменения задающего параметра, вводимого извне.
В следящих системах значения задающего параметра, а, следовательно, и значения регулируемого параметра могут изменяться в широких пределах по произвольной, заранее неизвестной программе.








