 2020-05-21
2020-05-21 163
163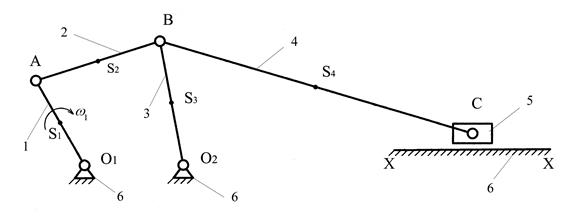
|
| Рисунок Кинематическая схема механизма |
Звенья механизма
| Звено ззвзвеназвена | Наименование | Подвижность | Число подвижных звеньев |
| 1 | Кривошип | Подвижное | n=5 |
| 2 | Шатун | Подвижное | |
| 3 | Коромысло | Подвижное | |
| 4 | Шатун | Подвижное | |
| 5 | Ползун | Подвижное | |
| 6 | Стойка | Неподвижное |
Кинематические пары
| № п/п | Обозначение на структурной схеме | Соединяемые звенья
|
Вид
| Индекс
| |
| 1 2 | О1 | 1,6 | Вращат. | ВО1(1,6) | |
| 2 | А | 1,2 | Вращат. | ВA(1,2) | |
| 3 | В | 2,3 | Вращат. | ВB(2,3) | |
| 4 | В | 3,4 | Вращат. | ВВ(3,4) | |
| 5 | С | 4,5 | Вращат. | ВC(4,5) | |
| 6 | С | 5,6 | Поступат. | ПС(5,6) | |
| 7 | О2 | 3,6 | Вращат. | ВО2(3,6) |
1. Выделяем неподвижное звено – стойку «0», на которой закреплены неподвижные оси шарниров О1 и О2, а также направляющие ползуна.
2. Нумеруем арабскими цифрами подвижные звенья. Целесообразно нумеровать звенья последовательно от источника энергии (ведущего звена) до наиболее удаленных потребителей.
В рассматриваемом механизме пять подвижных звеньев: звено 1 – кривошип, совершает вращательное движение с полным оборотом на 3600; 2 и 4 – шатуны, совершают плоско - параллельное движение с вращением относительно подвижных осей; звено 3 – коромысло, совершает колебательное движение относительно неподвижной оси О2; звено 5 – ползун, совершает возвратно - поступательное движение по фиксированным направляющим, 6 – стойка.
3. Классифицируем кинематические пары (КП), которые определяют относительное движение смежных звеньев.
Например
Шарнир О1 соединяет в кинематическую пару звенья 1 (кривошип) и 6 (стойка).
Вид движения вращательный (см. таблицу кинематических пар).
Индекс пары В О1(1,6) означает – вращательное соединенная в т. О1 звеньями 1 и 6.








